 2015-04-08
2015-04-08 1751
1751Гармонический осциллятор – это система, уравнение движения которой описывается дифференциальным уравнением:
 , (2.1)
, (2.1)
где  - величина, совершающая колебания;
- величина, совершающая колебания;
 –
– Колебания гармонического осциллятора есть важный пример периодического движения [10]. В качестве примеров гармонического осциллятора могут быть пружинный, физический и математический маятники, колебательный контур (для малых токов и напряжений).
1. Пружинный маятник - это груз массой m, который подвешен на абсолютно упругой пружине и совершает гармонические колебания под действием упругой силы:
 , (2.2)
, (2.2)
где  - жесткость пружины.
- жесткость пружины.
Уравнение движения маятника имеет вид:
 . (2.3)
. (2.3)
Из формулы (2.1) вытекает, что пружинный маятник совершает гармонические колебания по закону:
 , (2.4)
, (2.4)
с циклической частотой:
 , (2.5)
, (2.5)
и периодом:
 . (2.6)
. (2.6)
Формула (2.6) верна для упругих колебаний в границах, в которых выполняется закон Гука, т.е. если масса пружины мала по сравнению с массой тела. Потенциальная энергия пружинного маятника, используя (2.5) и формулу потенциальной энергии, равна:
 . (2.7)
. (2.7)
2. Физический маятник - это твердое тело, которое совершает колебания под действием силы тяжести вокруг неподвижной горизонтальной оси, которая проходит через точку О, не совпадающую с центром масс С тела (рис. 2.1).
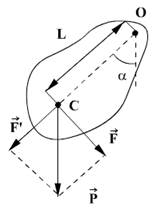
Рис. 2.1 – Физический маятник
Если маятник из положения равновесия отклонили на некоторый угол α, то, используя уравнение динамики вращательного движения твердого тела, момент M возвращающей силы:
 , (2.8)
, (2.8)
где  - момент инерции маятника относительно оси, которая проходит через точку подвеса О;
- момент инерции маятника относительно оси, которая проходит через точку подвеса О;
 - расстояние между осью и центром масс маятника;
- расстояние между осью и центром масс маятника;
 – возвращающая сила (знак минус указывает на то, что направления
– возвращающая сила (знак минус указывает на то, что направления  и
и  всегда противоположны;
всегда противоположны;  поскольку колебания маятника считаются малыми, т.е. маятник из положения равновесия отклоняется на малые углы).
поскольку колебания маятника считаются малыми, т.е. маятник из положения равновесия отклоняется на малые углы).
Уравнение (2.8) запишем как:
 . (2.9)
. (2.9)
Принимая
 , (2.10)
, (2.10)
получим уравнение:
 , (2.11)
, (2.11)
идентичное с (2.1), решение, которого (2.1) найдем и запишем как:
 . (2.12)
. (2.12)
Из формулы (2.12) вытекает, что при малых колебаниях физический маятник совершает гармонические колебания с циклической частотой  и периодом:
и периодом:
 , (2.13)
, (2.13)
где введена величина  - приведенная длина физического маятника.
- приведенная длина физического маятника.
Точка О' на продолжении прямой ОС, которая отстоит от точки О подвеса маятника на расстоянии приведенной длины L, называется центром качаний физического маятника (рис. 2.1). Применяя теорему Штейнера для момента инерции оси, найдем:
 , (2.14)
, (2.14)
т. е. ОО' всегда больше ОС. Точка подвеса О маятника и центр качаний О' имеют свойство взаимозаменяемости: если точку подвеса перенести в центр качаний, то прежняя точка О подвеса будет новым центром качаний, и при этом не изменится период колебаний физического маятника.
3. Математический маятник - это идеализированная система, состоящая из материальной точки массой m, которая подвешена на нерастяжимой невесомой нити, и которая колеблется под действием силы тяжести. Хорошее приближение математического маятника есть небольшой тяжелый шарик, который подвешен на длинной тонкой нити. Момент инерции математического маятника:
 , (2.15)
, (2.15)
где - длина маятника.
Поскольку математический маятник есть частный случай физического маятника, если предположить, что вся его масса сосредоточена в одной точке - центре масс, то, подставив (2.15) в (2.13), найдем выражение для периода малых колебаний математического маятника:
 . (2.16)
. (2.16)
Сопоставляя формулы (2.13) и (2.16), видим, что если приведенная длина L физического маятника равна длине математического маятника, то периоды колебаний этих маятников одинаковы. Значит, приведенная длина физического маятника - это длина такого математического маятника, у которого период колебаний совпадает с периодом колебаний данного физического маятника.








