 2015-04-30
2015-04-30 600
600Конструкция механизма преобразования перемещений изображена на (рис.15)
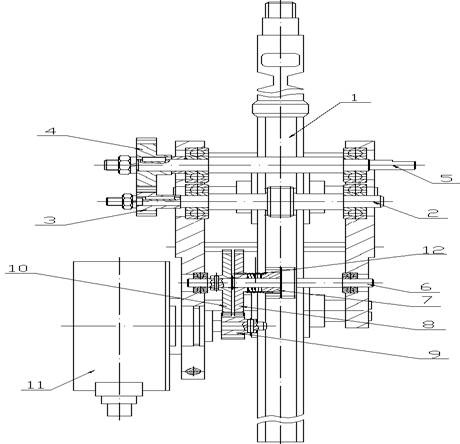
Рисунок 15 – Механизм преобразования перемещений.
Редуктор приводится в движение за счет рейки 1 которая с помощь резьбового соединения крепится к подвижной траверсе разрывной машины. Также в состав редуктора входит вал-шестерня 2 который передает вращательное движение через зубчатые колеса 3, 4 валу 5. Вал 5 связан с барабаном самопишущего устройства машины. На валу-шестерне 6 редуктора крепится зубчатое колесо 10, а между ним и шестерней вала-шестерни устанавливаются свободно два зубчатых колеса 8, 7. В колеса 8, 7 устанавливается пружина кручения 12 для выборки зазора в зубчатых соединениях.
Зубчатые колеса 8, 10 передают вращение через зубчатое колесо 9 непосредственно преобразователю перемещений 11
Схема работы преобразователя перемещений приведена на (рис.16)
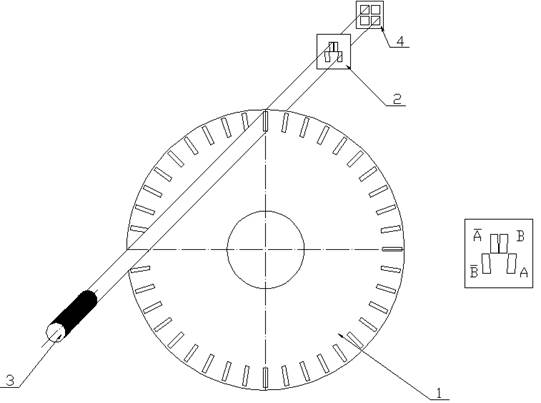
Рисунок 16 – Схема преобразователя перемещений.
Преобразователи угловых перемещений осуществляет преобразование измеряемого перемещения в последовательность электрических сигналов, содержащих информацию о величине и направлении этих перемещений для последующей обработки в системах.
Принцип работы преобразователей основан на фотоэлектрическом считывании растровых и кодовых сопряжений. В состав преобразователя входит растровое измерительное звено, состоящее из подвижного измерительного растра 1 и неподвижного индикаторного растрового анализатора 2.
В состав растрового анализатора входят 4 поля считывания А, В, А, В, каждое из которых имеет пространственный сдвиг относительно предыдущего на 1/4 периода растра. Параллельный световой поток, осветителем 3, проходя через растровое сопряжение, анализируется 4х квадрантным приемником 4. Соединенные соответствующим образом фотоприемники позволяют получить четыре ортогональных токовых сигнала  изображенных на (рис.17) постоянная составляющая которых не зависит от уровня освещенности.
изображенных на (рис.17) постоянная составляющая которых не зависит от уровня освещенности.
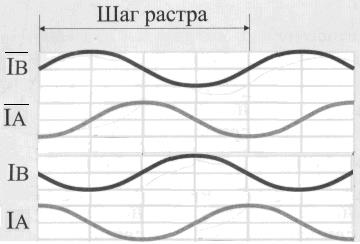
Рисунок 17 – Сигналы на выходе фотоприемника.
Наличие четырех ортогональных измерительных сигналов позволяет определить направление перемещения и повысить разрешающую способность преобразователей при обработке этих сигналов в электронных блоках преобразователей.
Сигнал  опережает сигнал
опережает сигнал  при вращении по часовой стрелке измерительного лимба 1, жестко связанного с валом преобразователя (вид со стороны вала преобразователя).
при вращении по часовой стрелке измерительного лимба 1, жестко связанного с валом преобразователя (вид со стороны вала преобразователя).








