 2015-04-20
2015-04-20 444
444Курсовой проект на тему: “Создание топографической карты масштаба 1:10000”
Введение.
§ 1. Задание, исходные данные.
§ 2. Характеристика района съемки.
Участок съемки расположен в юго-восточной части европейской территории России. Местность всхолмленная со средними превышениями в пределах стереопары hср.=21,35 метров и углами наклона не более 2* 17' градусов. Формы рельефа плавные, с наличием промоин и оврагов.
Контурная часть представлена населенными пунктами сельского типа, связанными между собой проселочными дорогами и двумя шоссейными, небольшими массивами леса и пашней. В среднем контуристость местности невысокая, местность открытая.
§ 3. Требования к точности карты и основных процессов её создания.
а) Требования к точности карты
Таблица 7
| Высота сече- | Ср. погрешность съёмки рельефа | ||
| Район съёмки | ния рельефа горизонталями, м | в долях сечения | в метрах |
| Плоскоравнинные с углом наклона местности до 1° | 1,0 | 1/4 | 0,25 |
| Равнинные с углом наклона местности от 1° до 2° | 2,0 | 1/3 | 0,66 |
| Равнинные пересеченные и всхолмленные с углами наклона местности от 2° до 6° | 2,0(2,5) | 1/3 | 0,66 (0,8) |
| Горные и предгорные | 5,0 | 1/3 | 1,67 |
n на каждом кв. дециметре карты должны быть подписаны отметки высот 5-15 характерных точек (в том числе урезы воды) с точностью: 75% погрешности съемки рельефа (0,6м), а в горных районах - не более 0,5 высоты сечения.
n ср. погрешность положения на карте четких контуров и предметов местности не должна превышать: 0,5 мм (5м) - при создании карт равниных и всхолмленных районов с углами наклона до 6°, 0,7 мм (7м) - при создании карт горных и высокогорных районов.
б) Требования к фотограмметрическим сетям
Точность точек карты может быть представлена в виде:
mXк = (m2Xтпп + m2Xфс + m2Xс)1/2
mYк = (m2Yтпп + m2Yфс + m2Yс)1/2
mZк = (m2Zтпп + m2Zфс + m2Zс)1/2,
где точность выражена в средних квадратических ошибках:
mXк, mYк, mZк - точность точек карты,
mXтпп, mYтпп, mZтпп - точность точек полевой подготовки снимков,
mXфс, mYфс, mZфс - точность точек фотограмметрической сети,
mXс, mYс, mZс - точность съёмки (создания карты).
Для нашего случая:
mXк = mYк = 0,5 мм в масштабе карты (5 м)
mZк = 0,6 м.
Положив mXфс = mXс, mYфс = mYс, mZфс = mZс и потребовав, чтобы mXтпп, mYтпп, mZтпп составляли менее 1/3 ошибок mфс и mс, чтобы ими можно было пренебречь, получим:
mXк = mXфс  ,
,
mYк = mYфс ,
mZк = mZфс .
Отсюда mXфс = mXк/ = 0,5мм / = 0,35 мм,
mYфс = mYк/ = 0,5мм / = 0,35 мм,
mZфс = mZк/ = 0,6м/ = 0,43 м.
Точность определения координат точек полевой подготовки снимков
mXтпп = 1/3 mXфс» 0,35мм/3» 0,1 мм
mYтпп = 1/3 mYфс» 0,35мм/3» 0,1 мм
mZтпп = 1/3 mZфс» 0,43м/3» 0,15 м» 0,1 высоты сечения рельефа.
(Эти данные можно свести в таблицу).
§ 4. Техническое проектирование пространственной фототриангуляции.
§ 4.1 Обоснование параметров аэрофотоснимков
а) Определим параметры H, f, m используя приближенную формулу dh = H/p dp = mf/p dp,
где dh - точность высот подписных точек карты
H - высота фотографирования
p - продольный параллакс - в данном случае базис фотографирования, который характеризует формат снимков (при формате 18 ´ 18см, p» 70-75 мм)
dp - разность продольных параллаксов - в данном случае точность измерения снимков (исходя из наличия приборов, на которых будет производиться обработка снимков
m - знаменатель масштаба снимков - m = H / f
f - фокусное расстояние снимков.
Последовательно определяем H, f, m, а ниже проверяем соответствие этих параметров решаемым задачам и уточняем их.
б) Продольное (p) и поперечное (q) перекрытия снимков определим по формулам:
p = 60 + h / (H - h) ´ 40, q = 30 + h / (H - h) ´ 70,
где h - превышения точек местности
H - высота фотографирования
§ 4.2 Проектирование с применением метода имитационного моделирования.
Form=23.0 x 23.0 F=205.188 M= 14000 Str= 2 Plt= 6 Net/Meas.(Old/New)=O/N
#----------------+----------------#
I * * I
I 0 0 I
I I
I I
I I
I I
I I
+ * * +
I I
I I
I I
I & I
I I
I 0 0 I
I * * I
#----------------+----------------#
Fiducial points:X=05/01(9) Y=05/01(9) Z=05/01(9) Fst=01/01 Mxy=.000mm El= 50.m
Linear orient.:X=00/00(9) Y=00/00(9) Z=00/00(9) Fst=01/01 ABxy=10.0m ABz= 5.0m
Angle orientat.:A=00/00(9) O=00/00(9) K=00/00(9) Fst=01/01 AnAO=.50ш AnK=.50ш
APX=.1m APY= 1.0m APZ=.1m ACX=.1m ACY= 1.0m ACZ=.1m AAO=.01ш AKa=.01ш
SE(MFt)=0 MPX=.0m MPY=.0m MPZ=.0m MCX=.0m MCY=.0m MCZ=.0m MCA=.00ш
P= 62.9% Q= 29.4%
SExmax=.000 SEymax=.000
NPE=100 MX=.000 MY=.000 MP=.000 MQ=.000
Analytical block phototriangulation. Ver. 9.1.27
Start Time: 15 11 22
Fictitious data: 2 Strip(s), 6 Photograph(s).
Photographs: 12
Strips: 2
Pairs: 10
Points: 100
Model points: 48
Unknowns: 216
Band width: 135
Photograph orientations estimates:
RMS.042.045 2.636.000007.000010.000000
RMS est..009.009.538.000002.000002.000000
System..013.010 -2.636 -.000003 -.000004.000000
Max. -.060 -.099 -2.649 -.000011.000019.000001
Check points estimates:
RMS.001.001.014
RMS est..000.000.002
RMS xy, xyz.001.015
/m H/RMS.000.000 198544.
System..000.000 -.001
Max. -.002 -.003 -.031
DimX,Y,S 7471. 8243. 62.
Finish Time: 15 11 30
Total:.13 min.
§ 5. Технологическая схема создания карты масштаба 1:10000
Имеются снимки: m = …, f = 100, H = …
Выявили:
а) возможность камерального дешифрирования снимков;
Объекты могут быть опознаны, если их размеры на снимках не менее 0,2 мм. Например по снимкам масштаба 1:___ можно камерально опознавать компактные объекты, размеры которых на местности не менее 5,4 м. Большинство объектов картографируемой территории (дома, улицы) имеют размеры более 5,4 м. И лишь отдельные предметы (например, колодцы) менее 5 м. По снимкам масштаба 1: … можно отдешифрировать все объекты, однако объем работ при этом резко возрастает.
б) возможности создания фотоплана;
Чтобы обеспечить точность планового положения точек карты, необходимо, чтобы смещения точек на трансформированном снимке вследствие влияния рельефа не превышали 0,4 мм в масштабе создаваемой карты (4 м на местности)
Dr = r,мм ´ h,м / H,м = r,мм ´ h,м / f,мм ´ m = …
r - расстояние от точки надира до наиболее удаленной от неё, но находящейся в рабочей зоне аэроснимка (для снимков формата 18 ´ 18 см r обычно принимают равным 75 мм.
Следовательно, создание фотоплана путем трансформирования снимков на одну плоскость возможно (невозможно). Если невозможно, то значит необходимо иметь подробную цифровую модель рельефа (ЦМР), которую можно получить в результате обработки стереопар снимков.
в) возможность построения фотограмметрических сетей и создания карты;
(если, например, m = 27000, f = p = 70 мм)
Точность определения высот, положив Dp = 0,02 мм, получим
mh = (H / p) ´ Dp = (1980м / 70мм) ´ 0,02 мм» 0,5м
На основании выполненных расчетов установим:
- Фотограмметрические сети строить по снимкам масштаба …. Отметки высот точек, подписываемых на карте, определять из фототриангуляции, а не в процессе съемки.
- Дешифрирование снимков производить по залету в масштабе … с использованием снимков крупного масштаба 1: …
- Съемку рельефа производить, в основном, по снимкам масштаба 1: … на цифровых фотограмметрических системах, а в местах сложного рельефа - по снимкам масштаба 1: …
- Съёмку рельефа и контуров производить на чистой основе, т.к. трансформировать снимки масштаба 1: … на одну плоскость нельзя, а трансформировать снимки путем дифференциального трансформирования нецелесообразно, т.к. резко увеличивается объём работ по их трансформированию. Кроме того, эффективность их использования будет невысокой вследствие того, что на местности имеется сравнительно большое количество только крупных объектов.
На основании изложенного из двух методов создания топографических карт выбираем стереотопографический. Поэтому предлагается следующая технологическая схема создания карты стереотопографическим методом.
1) Аэрофотосъемка.
Аэрофотосъемка масштаба 1:m, f = 70мм для построения сетей и съёмки рельефа, а также для дешифрирования снимков.
2) Полевая подготовка снимков.
n определение координат точек полевой подготовки снимков (опознаков) и опознавание их на снимках (масштаба 1:4000);
n дешифрирование снимков (масштаба 1: 4000).
3) Построение маршрутных фотограмметрических сетей.
Способ построения сетей - способ независимых моделей, т.к. он позволит легко выявить ошибочные измерения и применяется на производстве.
Измерения снимков производить на цифровых фотограмметрических системах (mx = my = 0,02 мм, mp = mq = 0,005 мм).
Съёмку рельефа и контуров производить также на цифровых фотограмметрических системах (в процессе съёмки производить дешифрирование снимков).
4) Подготовка оригинала карты к изданию (на CAD-системах).
5) Издание карты.
§ 6. Техническое проектирование пространственной фототриангуляции.
А. Расчет геодезического обоснования.
- Точность фотограмметрических сетей зависит от параметров съёмки (m, f, H, p, q), точности измерения снимков (mx, my) на на цифровых фотограмметрических системах и от количества и расположения опорных точек. Из выполненного выше анализа следует, что параметры снимков соответствуют требованиям высокоточного построения сети; для измерения используем цифровые фотограмметрических системы (mx = my = 0,02 мм, mp = mq = 0,005 мм). Точность определения точек полевой подготовки мы установили. Следовательно, точность сети в нашем случае будет зависеть от количества и расположения опорных точек.
- С целью решения этого вопроса рассмотрим ошибки снимков и законы их исключения. Ошибки снимков разделяют на две группы:
n случайные ошибки (ошибки измерения снимков и построения фотоизображения)
n систематические ошибки (ошибки, вызванные остаточным влиянием дисторсии объектива съемочной камеры, деформации фильма и др.).
Из теории фотограмметрии известно, что накопление случайных ошибок в сети происходит по следующему закону
mXфс = 0,27 m mq n13/2
mYфс = 0,14 m mq n13/2 (3)
mdфс = 0,3 m mq n13/2
mZфс = 0,23 m (f/b) mq n23/2 = 0,23 H/b mq n23/2,
где
mXфс, mYфс, mZфс - средние квадратические ошибки координат точек сети, ориентированной по опорным точкам, расположенным в концах маршрута;
m - знаменатель масштаба снимков;
mq - точность измерения снимков;
n1 - расстояние между плановыми опорными точками, выраженное в базисах фотографирования (стереопарах);
n2 - расстояние между высотными опорными точками, выраженное в базисах фотографирования (стереопарах). 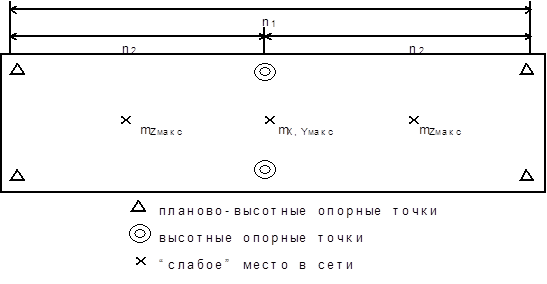
Рис. 1
Зная заданную точность построения сети (mXфс, mYфс или md и mZфс) и записав уравнения (3) относительно n1 и n2 получим
n1 = (mXфс / (0,27 m mq))2/3 или
n1 = (md / (0,3 m mq))2/3 (4)
n2 = (mZфс / (0,23 m (f/b) mq))2/3,
можем рассчитать расстояние между опорными точками в зависимости от накопления случайных ошибок.
Накопление систематических ошибок рассмотрим на примере дисторсии, которая характеризуется коэффициентом e:
dXфс = - 1/4 m f2 e b n12
(5)
dZфс = - 1/4 m f3 e b n22
Решив (5) относительно n и n’, получим:
n1 = ((4 dXфс)/(m f2 e b))1/2
(6)
n2 = ((4 dZфс)/(m f3 e b))1/2
Определим дважды n1 и n2 по формулам (4) и (6) и выберем из двух соответственных значений наименьшее. Полученные значения и будут расстояниями между плановыми (n1) и высотными (n2) опорными точками. При расчетах величину e следует взять равной 4 ´ 10-8.
Таким образом, расстояния между опорными точками установим следующие: n1 = …, n2 = …. При данных n1 и n2 обеспечивается необходимая точность внешнего ориентирования сети и устранение её деформаций. Поскольку наша сеть имеет длину … базисов, то примем n1 = …, n2 = ….
Б. Проектирование точек сети.
В сеть должны быть включены следующие точки:
- Опорные - в соответствии с расчетами.
- Определяемые
а) связующие (6 точек на стереопару для построения сети);
б) точки на характерных элементах местности - подписные точки (10-15 на 1 дм2 карты.
Проект реальной сети (см. приложение)
§ 7. Технология пространственного фототриангулирования.
- Последовательность измерений ….
- На каждую точку производилось по два наблюдения, из которых бралось среднее. Допустимые расхождения между двумя наведениями D1 = 0,02мм ´ = 0,03 мм.
Для стереопар, которые измерялись мной и другим исполнителем, производится оценка расхождений координат по каждой точке. Расхождения допустим 2 = 0,02мм ´ 2 = 0,04 мм. Расхождения на связующих между стереопарами точках (допустимое) D3 = 0,02мм ´ = 0,03 - 0,04 мм.
§ 8. Технология съемки рельефа и контуров на цифровой фотограмметрической системе
- Описание технологии.
- Допуски.
Таблица 8
| Наименование процессов | Допуски |
| Остаточные поперечные параллаксы | 0,03 мм |
| Невязки на опорных точках после внешнего ориентирования модели | 0,2 мм в плане, 0,2 мм по высоте (в масштабе) - 2 м |
| Точность положения контуров | 0,35 мм |
§ 9. Результаты построения фотограмметрических сетей
- Средние расхождения измеренных координат из двух наведений ….
- Средние (ср.кв.) расхождения измеренных координат точек снимков на связующих точках.
Таблица 9.
| Номер | Номер | Расхождения | |
| стереопары | Точки | Dx | Dy |
| 409-410 | 27 28 | -0,05 | +0,06 |
| … | … | … | … |
| MDx(Dy) | … | … |
(Объяснить, хорошо или плохо и почему).
- Остаточные поперечные параллаксы, мм
Таблица 10.
| Номер стереопары | Номер точки | dq, мм |
| 410-411 | 0,04 | |
| mq |
- Средние расхождения пространственных фотограмметрических координат связующих точек свободной сети
Таблица 11.
| Номер | Номер | Расхождения, мм | ||
| стереопары | точки | DX | DY | DZ |
| 409-410 | 27 28 | 0,25 0,20 | 0,30 0,28 | 0,21 0,25 |
| 410-411 | … | … | … | … |
| m | mDX | mDY | mDZ |
- Точность координат точек сети по расхождениям на опорных точках.
Таблица 12.
| Номер | Расхождения, м | ||
| точки | DX | DY | DZ |
| 27 31 | 0,87 … | 0,98 … | 0,50 … |
| m | mX | mZ | mZ |
Точность координат точек сети по расхождениям координат на контрольных точках.
Таблица 13.
| Номер | Расхождения, м | ||
| точки | DX | DY | DZ |
| 1,02 | 1,03 | 0,68 | |
| … | … | … | … |
| m | mX | mZ | mZ |
Выводы о качестве сети (по сравнению с расчетами и допусками).
Выводы по курсовой работе.
- Степень выполнения задания на курсовую работу.
- Что хорошо и плохо в организации курсового проектирования.
- Предложения по совершенствованию учебного процесса.








