2015-04-30
2015-04-30 929
9293.1. НЕРЕГУЛИРУЕМЫЕ АСИНХРОННЫЕ ЭЛЕКТРОДВИГАТЕЛИ
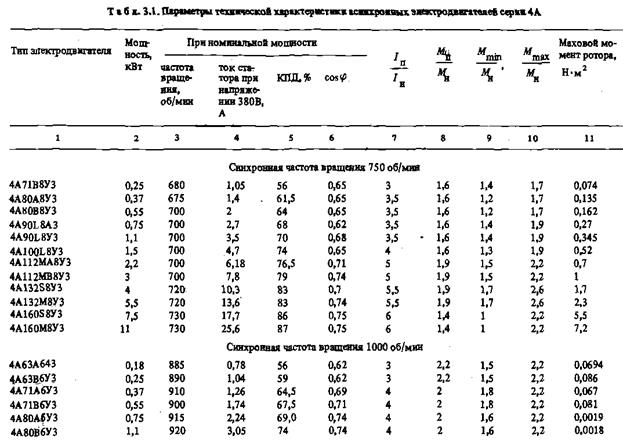
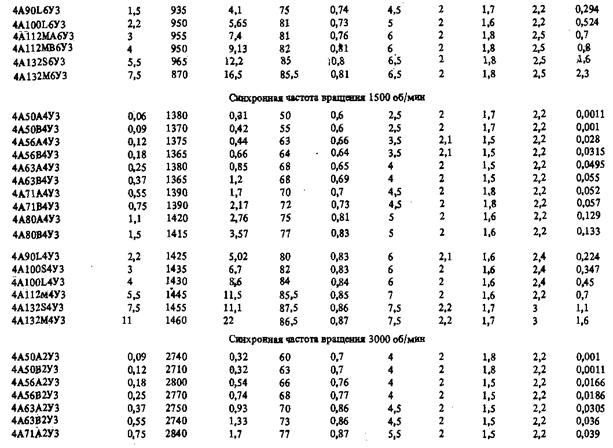
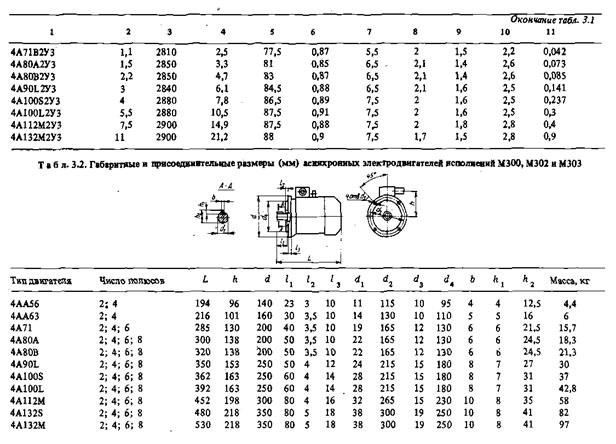
Асинхронные электродвигатели с короткозамкнутым ротором применяются в ступенчатых приводах главного движения и подачи, а также в приводах вспомогательных движений. Они наиболее надежны и просты в эксплуатации, применяются без преобразователей и специальных усилителей, имеют небольшие габариты, допускают высокие перегрузки. Технические данные двигателей серии 4А основного исполнения приведены в табл. 3,1,где IП и IН..- пусковой и номинальный ток; МП, МН., Мmin.., Мmax.. пусковой, номинальный, минимальный и максимальный моменты, развиваемые двигателем. Обозначения двигателей расшифровываются так: 4 - порядковый номер серии; А - вид двигателя (асинхронный); последующие две или три цифры - высота оси вращения в миллиметрах; S, М или L установочный размер по длине станины; А или В - длина сердечника статора (отсутствие буквы в обозначении двигателя свидетельствует о наличии только одной длины сердечника); последующее число 2, 4, 6, 8, 10 или 12 - число плюсов; УЗ - климатическое исполнение и категория размещения. Основные размеры ряда двигателей приведены в табл. 3,2.
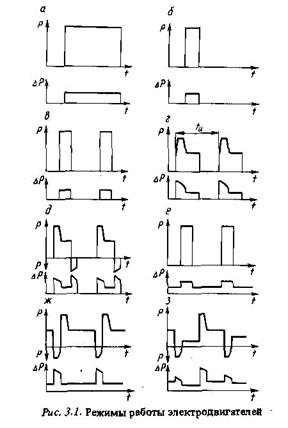
Номинальный режим работы асинхронных электродвигателей, как и других электрических машин, должен соответствовать одному из следующих:
продолжительному SI (рис, 3,1,а), когда продолжительность работы двигателя при неизменной внешней нагрузке достаточна для достижения практически постоянной температуры всех его частей;
кратковременному S2 (рис. 3.1,б),для которого характерны работа двигателя с постоянной нагрузкой в течение времени, недостаточного для достижения его установившейся температуры, и отключение на время, в течение которого двигатель охлаждается до температуры окружающей среды;
повторно-кратковременному S3 (рис, 3,1, в), при котором пусковые потери практически не оказывают влияния на повышение температуры отдельных частей двигателя;
повторно-кратковременному с частыми пусками S4 (рис, 3.1,г),когда пусковые потери приводят к повышению температуры отдельных частей двигателя;
повторно-кратковременному с частыми пусками и электрическим торможением S5 (рис, 3.1, д), при котором потери в процессе торможения приводят к дополнительному повышению температуры двигателя;
перемежающемуся S6 (рис. 3,1, е), при котором работа двигателя с нагрузкой чередуется с холостым ходом;
перемежающемуся с частыми реверсами при электрическом торможении S7 (рис, 3.1, ж), при котором потери при реверсе существенно влияют на температуру отдельных частей двигателя;
перемежающемуся с двумя или более частотами вращения S8 (рис, 3.1, з), при котором потери в моменты перехода с одной частоты вращения на другую влияют на температуру отдельных частей двигателя.
3. 2. РЕГУЛИРУЕМЫЕ ЭЛЕКТРОДВИГАТЕЛИ ПОСТОЯННОГО ТОКА ДЛЯ ПРИВОДОВ ГЛАВНОГО ДВИЖЕНИЯ
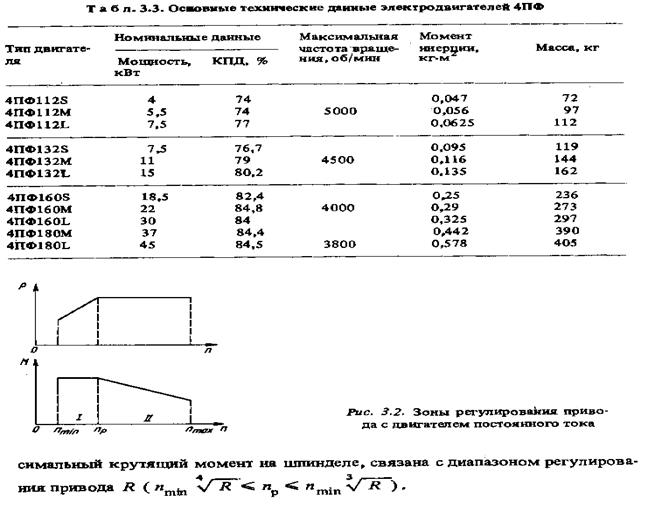
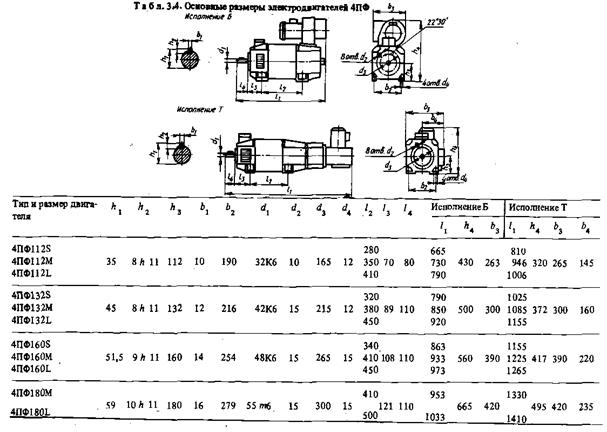
В приводах главного движения станков с ЧПУ применяют регулируемые электродвигатели постоянного тока серии 4ПФ, Технические характеристики двигателей основного исполнения с номинальной частотой вращения 1000 об/мин приведены в табл. 3.3, Имеются двигатели с номинальной частотой вращения 500..,1500 об/мин. Основные размеры двигателей приведены в табл. 3.4.
Номинальным режимом работы двигателей в диапазоне частот вращения от 1 об/мин до максимальной является S1, возможна работа в режимах S2-S8. Двигатели серии 4Пф применяются в составе электромеханических приводов с регулированием частоты вращения в двух зонах. В зоне 1 (рис, 3.2) регулирование производится с постоянным моментом М на шпинделе станка, в зоне 2 - с постоянной мощностью Р, В зоне 1 при относительно низкой частоте вращения шпинделя полная мощность привода не может быть использована, Расчетная частота вращения и, при которой определяется мак-