 2015-05-20
2015-05-20 2929
2929Функциональную схему замкнутой одноконтурной системы автоматического регулирования температуры топлива (мазута) на выходе кавитационного нагревателя можно представить, как показано на рисунке 3.8.
Рисунок 3.8 – Функциональная схема системы автоматического регулирования температуры топлива (мазута) на выходе кавитационного нагревателя
Номинальное задающее напряжение для данного режима рассчитаем по формуле (3.7)
 , (3.7)
, (3.7)
где Тном – номинальная температура топлива (мазута) в соответствии с уставкой (см. таблицу 3.1), Тнач – начальная температура топлива (мазута) на входе в кавитационный нагреватель, Тмакс – максимальная температура топлива (мазута) на выходе кавитационного нагревателя, U – амплитуда напряжения задающего сигнала.
Таким образом, номинальное задающее напряжение для данного режима равно (3.8)
 (3.8)
(3.8)
Коэффициент обратной связи САР по контуру регулирования температуры топлива (мазута) на выходе кавитационного нагревателя равен (3.9):
 (3.9)
(3.9)
Расчет параметров регулятора одноконтурной системы автоматического регулирования температуры топлива (мазута) на выходе кавитационного нагревателя будем производить с помощью блока Check Step Response Characteristics (аналога блока NCD Outport в более ранних версиях Simulink) раздела Signal Constraints библиотеки Simulink Design Optimization.
Данный блок предоставляет в распоряжение пользователя графический интерфейс для настройки параметров динамических объектов, обеспечивающих желаемое качество переходных процессов в результате отклика на ступенчатое воздействие. В качестве средства для достижения указанной цели принимается оптимизационный подход, обеспечивающий минимизацию функции штрафа за нарушение динамических ограничений.
Задание динамических ограничений осуществляется в визуальном режиме. На базе этих ограничений Check Step Response Characteristics автоматически генерирует задачу конечномерной оптимизации так, чтобы точка экстремума в пространстве настраиваемых параметров соответствовала выполнению всех требований, предъявляемых к качеству процесса. Эта задача решается с привлечением специализированной процедуры квадратичного программирования. Ход оптимизации контролируется на экране с помощью отображения графика контролируемого процесса и текущих значений минимизируемой функции. По завершении процесса его результат фиксируется в рабочем пространстве.
Модель замкнутой системы автоматического регулирования температуры топлива (мазута) на выходе кавитационного нагревателя, выполненная в приложении Simulink пакета MATLAB, показана на рисунке 3.9.
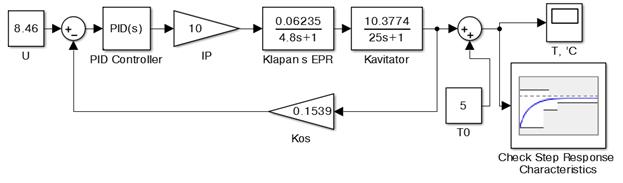
Рисунок 3.9 – Модель замкнутой системы автоматического регулирования температуры топлива (мазута) на выходе кавитационного нагревателя
Настройку регулятора будем производить на желаемый вид апериодического звена (апериодический процесс с минимальным временем регулирования). Данный вид настройки характеризуется перерегулированием σ=0%.
Задания динамических ограничений произведем в окне настройки параметров блока Check Step Response Characteristics (рисунок 3.10): начальное значение температуры 5 ⁰С, конечное (установившееся) значение 60⁰С, время увеличения до 80% от установившегося значения 55 секунд, время переходного процесса 70 секунд, перерегулирование 1% (перерегулирование менее 1% установить невозможно), допустимое отклонение (зона окончания переходного процесса) 1%.
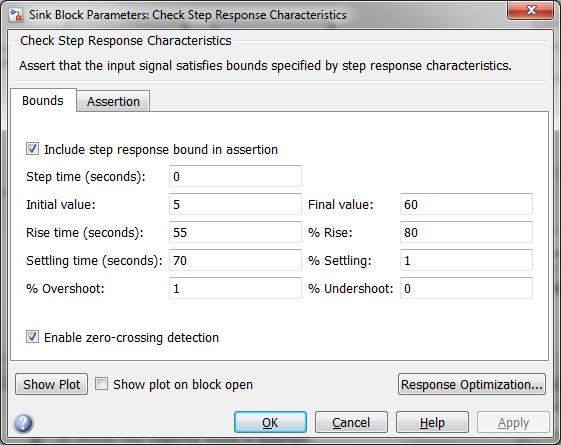
Рисунок 3.10 – Задание динамических ограничений параметров в блоке Check Step Response Characteristics
После задания динамических ограничений параметров запускаем итерационный расчет параметров ПИД-регулятора, при которых выполняются заданные ограничения динамики процесса (response optimization). Результат расчета параметров (внутренние переменные модели) показаны на рисунке 3.11.
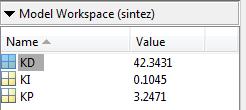
Рисунок 3.11 – Рассчитанные параметры регулятора (внутренние переменные модели)
Проведем эксперимент на основе полученных расчетных данных и определим соответствие показателей качества процесса начальным требованиям.
Динамические ограничения (рисунок 3.10) в графическом виде, а также полученный в результате итерационного расчета параметров ПИД-регулятора (response optimization) график переходного процесса по температуре топлива (мазута) после кавитационного нагревателя с учетом ограничений, показан на рисунке 3.12.
Для проверки работоспособности регулятора подадим возмущения Z1 и Z2, равные 5°С и минус 5°С в моменты времени 150 и 250 секунд соответственно.
График переходного процесса по температуре топлива (мазута) на выходе кавитационного нагревателя с отработкой регулятором возмущающих воздействий представлен на рисунке 3.13.
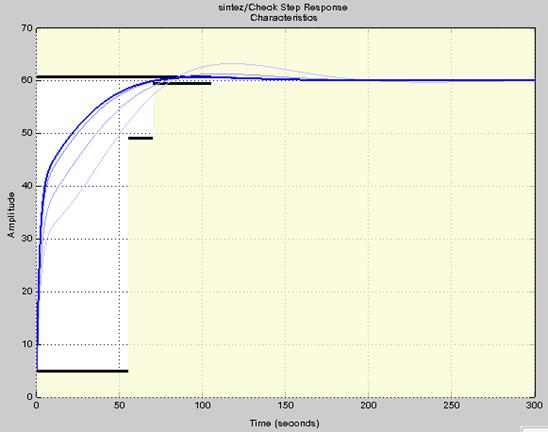
Рисунок 3.12 – График переходного процесса по температуре топлива (мазута) после кавитационного нагревателя с учетом ограничений
| T, °C | 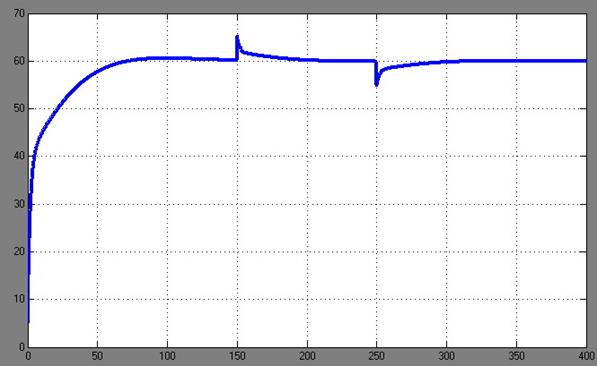 | |
| t, c | ||
Рисунок 3.13 – График переходного процесса по температуре топлива на выходе кавитационного нагревателя с отработкой регулятором возмущающих воздействий
Из графика переходного процесса видно, что установившееся значение равно 60°С. Время переходного процесса составляет около 50 секунд. Перерегулирование, как и следует при настройке на апериодическое звено, отсутствует. Как видно из графика, регулятор успешно отрабатывает возмущения. Задача синтеза регулятора успешно решена.
Перейдем к разработке прикладного программного обеспечения АСУТП.

