 2015-05-20
2015-05-20 547
547У (усилитель) - усилительное, пропорциональное звено:
kу = 10 + N/2;
Wу(p) = kу;
Г (генератор) – апериодическое звено:
kг = 0.1(13+0.05N);
Tг = 0.01·(8 + N/2), сек.
Д – двигатель постоянного тока. Модель двигателя по управлению – апериодическое звено второго порядка:
kду = 0.1·(11 + N/2) [об/(сек·В)];
Tя = 0.01·(6+0.1 N) сек;
Tм = 0.1(5 + 0.2 N) сек.

ТГ – пропорциональное звено:
kг = 0.1(2 + 0.1 N) [В· сек / об];
Wтг(p) = kтг
Задание к работе: собрать структурную схему САР ЧВ ДПТ, получить ее временные и частотные характеристики, оценить устойчивость системы по критерию Найквиста, оценить качество регулирования и осуществить предварительную коррекцию САР.
Порядок выполнения:
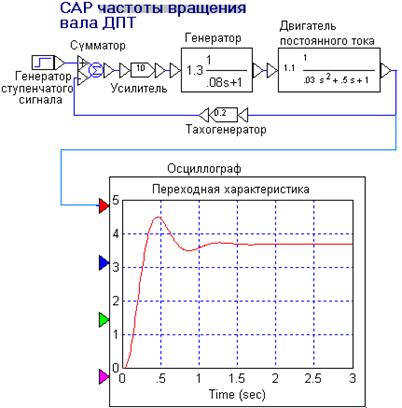
1. Рассчитать параметры элементов для своего варианта, собрать структурную схему и получить график переходного процесса.
2. Построить логарифмические частотные характеристики замкнутой САР. И оценить запасы устойчивости по амплитуде и фазе.
3. Выполнить структурно-параметрическую оптимизацию. В данном простейшем случае подразумевает введение ПИ-регулятора, что изменяет структуру САР, и подбор его наилучших параметров.
Задача состоит в том, чтобы улучшить переходную характеристику САР, снизить ее колебательность, и уменьшить ошибки установившегося режима.
Ниже предлагается простой приближенный способ определения настроечных параметров ПИ-регулятора с использованием ЛАЧХ и ЛФЧХ. Передаточная функция ПИ-регулятора имеет вид:
где: kp – коэффициент усиления ПИ-регулятора;
Tp – постоянная времени ПИ-регулятора.
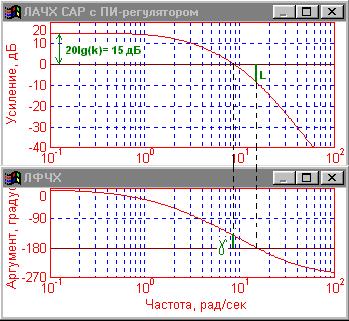
Для определения постоянной времени регулятора следует взять ЛАЧХ, для которой выполнены требования к запасам устойчивости по фазе и амплитуде, и провести к ней касательные с наклонами 0 дБ/дек и -20 дБ/дек:
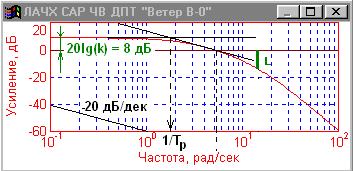
Точка сопряжения линий аппроксимации, касательных, проведенных к ЛАЧХ с наклоном в 0 дБ/дек и -20 дБ/дек, находится на частоте 1/Тр = 1.8 рад/сек. Поэтому Тр = 0.555 сек.
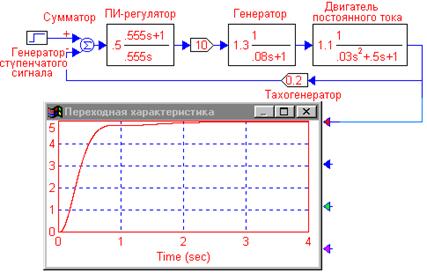
Хорошим начальным приближением для коэффициента усиления kp ПИ-регулятора является значение 0.5, которое можно затем уточнить методом проб.
Схема примет вид:
Переходная характеристика хорошего вида, можно попробовать несколько повысить усиление ПИ-регулятора для появления перерегулирования, меньшего 5%. Это и будет оптимальной схемой.
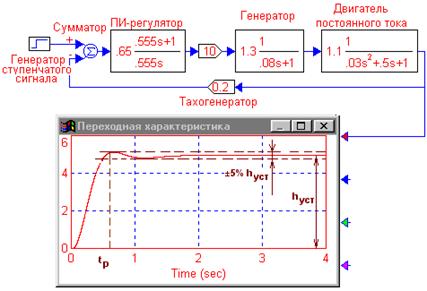
Как видно, время регулирования составляет 0.5 сек, перерегулирование не достигает 5%, качество регулирования в переходном режиме хорошее. Установившееся значение переходной функции равно 5.0 об/сек, что говорит о нулевой ошибке регулирования в установившемся режиме при отработке постоянного задания.
В завершение посмотрим, как выглядят ЛАЧХ и ЛФЧХ оптимизированной САР.
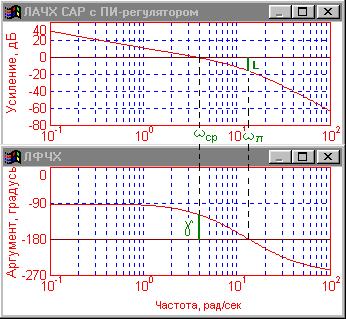
Запасы устойчивости по амплитуде (15 дБ) и фазе (700) хороши. ЛАЧХ на нижних частотах имеет наклон -20 дБ/дек, что определяется интегратором, входящим в контур. По той же причине ЛФЧХ на нижних частотах проходит вблизи -900.
Итак, выполнение лабораторной работы завершено.
4. Оформить отчет и сделать вывод о проделанной работе. Для оценки качества настройки системы, исходные и конечные качественные показатели представить в виде сравнительной таблицы:
| параметр | исходный | конечный |
| σ, % | ||
| tу, с | 0,4 | 0,5 |
| tп, с | 1,7 | 1,8 |
| ξ | ||
| kус | 3,7 | 4,5 |
| ΔL, дБ | ||
| Δφ, град |
Контрольные вопросы:
- Классификация систем автоматического управления. Примеры САУ.
- Принципы автоматического регулирования.
- Программы и законы регулирования.
- Основные подходы к оценке качества систем и общие понятия о соответствующих критериях.
- Постановка задачи синтеза систем, обзор используемых методов.
- Параметрическая и структурная оптимизация.
- ПИД-регуляторы, назначение, законы регулирования, область применения.
Содержание
Введение.. 4
1. Классификация систем автоматического регулирования 5
2. Основные понятия.. 6
3. Типовые динамические звенья.. 10
4. Соединение звеньев. 17
5. Преобразование структурных схем... 17
6. Частотные характеристики.. 19
7. Принципы автоматического регулирования.. 26
7.1 Принцип управления по внешнему возмущению... 26
7.2. Принцип управления по отклонению... 27
7.3. Комбинированное управление. 28
8. Анализ устойчивости САР. 28
8.1. Корневые критерии устойчивости.. 30
8.2. Алгебраические критерии. 32
8.2.1 Критерий устойчивости Гурвица. 32
8.2.2 Критерий Раусса. 34
8.3. Частотные критерии.. 34
8.3.1 Критерий Михайлова. 34
8.3.2 Критерий устойчивости Найквиста. 37
8.4. Использование ЛАЧХ. 39
9. Качество процессов автоматического управления. 41
10. Синтез САР. Регуляторы. 45
11. Краткие сведения о программном комплексе VisSim. 48
11.1. Диаграмма VisSim'а - виртуальная модель. 49
11.2. Блоки, имеющие только выход: генераторы.. 50
11.3. Блоки, имеющие вход и выход: преобразователи. 51
11.4. Блоки, имеющие только вход: индикаторы. 52
11.5. Блоки без входов и выходов: надписи и комментарии. 52
11.6. Запуск модели и подбор параметров моделирования. 54
11.7. Построение ЛАЧХ и ЛФЧХ. 56
12. Описание лабораторных работ. 59
12.1. Лабораторная работа 1. 59
12.2. Лабораторная работа 2. 65
12.3. Лабораторная работа 3. 72
12.4. Лабораторная работа 4. 82








