 2015-05-10
2015-05-10 425
425| Этап выполнения задания | Команды Matlab |
1. Для запуска пакета Simulink щелкните по кнопке  в командном окне Matlab или введите команду simulink в командной строке. в командном окне Matlab или введите команду simulink в командной строке.
| simulink |
| 2. Создайте новую модель с помощью верхнего меню открывшегося окна Simulink Library Browser. |  File – New – Model
File – New – Model
|
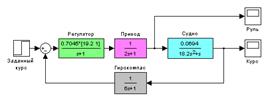
| 3. Перетащите блок Transfer Fcn (передаточная функция) из окна Simulink Library Browser (группа Continuous) в окно модели и введите числитель и знаменатель передаточной функции модели судна. | Двойной щелчок на блоке · Numerator [K] · Denominator [Ts 1 0] |
| 4. Дайте блоку название Судно. | ЛКМ на имени блока |
5. Аналогично добавьте еще три блока типа Transfer Fcn, назовите их Привод, Регулятор и Гирокомпас, введите нужные параметры. Заметьте, что передаточная функция привода должна быть  с учетом внутренней обратной связи. с учетом внутренней обратной связи.
| |
| 6. Сохраните модель в своей папке под именем lab6.mdl. | File – Save |
| 7. Выделите блок Гирокомпаси разверните его в другую сторону. | Нажать Ctrl+I или дважды нажать Ctrl+R. |
| 8. Сделайте, чтобы названия блоков Судно, ПриводиРегуляторбыли над блоками. | ПКМ на блоке, Format - Flip name |
| 9. Выберите цвет блоков на свой вкус. | ПКМ на блоке, Format – Background color |
| 10. Перетащите в окно модели блок Sum из группы Math Operations и установите его слева от регулятора. | ЛКМ |
| 11. Сделайте так, чтобы второй вход учитывался в сумме со знаком минус (отрицательная обратная связь). | Двойной щелчок на блоке, ввести |+- в поле List of signs |
| 12. Перетащите в окно модели блок Step из группы Sources и установите его слева от сумматора. Дайте ему имя Заданный курс. | |
| 13. Установите время подачи сигнала 0 и величину сигнала 10 (исследуем поворот на 10 градусов). | Двойной щелчок на блоке, 0 в поле Step time 10 в поле Final value |
| 14. Соедините все блоки нужным способом. | ЛКМ на источнике, удерживать Ctrl и ЛКМ на приемнике, или протащить ЛКМ от выхода одного блока к входу другого |
| 15. Перетащите в окно модели два блока Scope (осциллограф) из группы Sinks и установите их в правой части. Назовите их Руль и Курс. | |
| 16. Сделайте, чтобы на первый блок Scope поступал сигнал управления (угол поворота руля, после блока Привод), а на второй – сигнал выхода (курс судна). Сохраните модель. | Нажать ПКМ на линии в точке отбора сигнала, затем, не отпуская ПКМ, тащить линию к входу блока. |
| 17. Уменьшите окно до минимального размера, при котором видны все элементы, и скопируйте модель в буфер обмена. Затем вставьте ее из буфера обмена в отчет. |  Edit – Copy model to clipboard
Edit – Copy model to clipboard
|
| 18. Установите время моделирования 100 секунд. |
Simulation – Simulation parameters
100 в поле Stop time
|
| 19. Выполните моделирование. | ЛКМ по кнопке 
|
| 20. Посмотрите результаты моделирования, открыв окна для блоков Курс и Руль. |
Двойной щелчок по блоку
|
| 21. Настройте масштаб по осям в окнах обоих блоков, |  ЛКМ по кнопке ЛКМ по кнопке  – установить оптимальный масштаб – установить оптимальный масштаб
|
| 22. Сохраните настройки, | ЛКМ по кнопке 
|
| 23. Сделайте так, чтобы результаты моделирования передавались с обоих блоков Scope в рабочую область Matlab в виде матриц, в которых первый столбец – время, а второй – сигнал (курс или угол поворота руля). |
ЛКМ по кнопке  вкладка Data history
вкладка Data history

 Variable name:
phi (Курс) или
delta (Руль)
Format: Array
Variable name:
phi (Курс) или
delta (Руль)
Format: Array
|
| 24. Выполните моделирование еще раз. | ЛКМ по кнопке
|
| 25. Перейдите в командное окно Matlab и создайте новое окно для графика. В одном окне будут построены две кривых на разных осях. | figure(1); |
| 26. Разбейте окно на 2 части по вертикали и сделайте активным первый график. Первое число в команде subplotозначает количество ячеек с графиками по вертикали, второе – по горизонтали, третье – номер ячейки, которую надо сделать активной[2]. | subplot(2, 1, 1); |
| 27. Постройте график изменения курса. В команде plot сначала указывают массив абсцисс, затем – массив ординат. Двоеточие означает, что используются все строки. | plot(phi(:,1),phi(:,2)); |
| 28. Введите заголовок графика. | title('Курс'); |
29. Введите названия осей координат. Внутри апострофов для ввода греческих букв разрешается использовать команды LaTeX, Например, «\phi» означает греческую букву  , а «\delta» – букву , а «\delta» – букву  . .
| xlabel('Время, сек'); ylabel('\phi, градусы'); |
| 30. Аналогично постройте во второй ячейке график изменения угла поворота руля, используя данные из массива delta, полученного в результате моделирования. | subplot(2, 1, 2); plot(delta(:,1),delta(:,2)); title('Угол поворота руля'); xlabel('Время, сек'); ylabel('\delta, градусы'); |
| 31. Скопируйте построенный график в отчет. | print -dmeta |
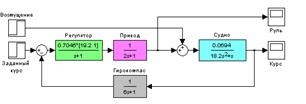
| 32. Удалите в окне модели связь между приводом и объектом. | ЛКМ по линии, нажать Delete.
|
| 33. Добавьте еще один блок Sum из группы Math Operations и установите его на освободившееся место. Настройте расположение входов и выхода так, чтобы первый вход был в верхней части круга.. | Двойной щелчок по блоку
++| в поле List of signs
|
| 34. Исследуем реакцию системы на постоянный сигнал, приложенный непосредственно к входу объекта. Он может моделировать какое-то постоянное возмущающее воздействие, например, влияние ветра. | |
| 35. Скопируйте блок Заданный курс, перетащив его правой кнопкой мыши, и установите для него величину скачка 2 градуса. Дайте ему название Возмущение. Подключите его выход к новому сумматору. Достройте нужные соединительные линии. | Перетаскивание ПКМ.
Двойной щелчок по блоку
2 в поле Final Value
Двойной щелчок по имени
|
36. Скопируйте полученную модель в отчет.
|
Edit – Copy model to clipboard
|
| 37. Увеличьте время моделирования до 500 и выполните моделирование. Проверьте, вышло ли судно на заданный курс 10 градусов. |
Simulation – Simulation parameters - Stop time
ЛКМ по кнопке
|
| 38. Перейдите в командное окно Matlab и запомните результаты моделирования в новых массивах. Они понадобятся для того, чтобы сравнить исходный и скорректированный варианты системы. | phi0 = phi; delta0 = delta; |
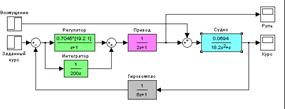
39. Чтобы регулятор компенсировал постоянную составляющую возмущения, надо добавить в него интегральный канал. Таким образом, получается ПИД-регулятор. Подключите параллельно регулятору интегрирующее звено с передаточной функцией  , ,  сек. Сохраните модель и скопируйте ее в отчет. сек. Сохраните модель и скопируйте ее в отчет.
| 
|
| 40. Выполните моделирование. Проверьте, вышло ли судно на заданный курс 10 градусов. |
ЛКМ по кнопке
|
| 41. Постройте в верхней части графика 2 кривых – переходные процессы по курсу для ПД- и ПИД-регуляторов. В команде plot можно перечислять несколько пар массивов – первая пара соответствует первому графику, вторая – второму и т.д. Три точки в конце строки означают перенос команды на следующую строку. Команда legend служит для вывода легенды – символьных строк, описывающих каждый из построенных графиков. | subplot(2, 1, 1); plot(phi0(:,1), phi0(:,2),... phi (:,1), phi(:,2)); title('Курс'); xlabel('Время, сек'); ylabel('\phi, градусы'); legend('ПД-регулятор',... 'ПИД-регулятор'); |
| 42. Сделайте выводы о влиянии интегрального канала на переходные процессы в системе. |
Таблица коэффициентов
| Вариант |  , сек , сек
|  ,рад/сек ,рад/сек
|  , сек , сек
|  , сек , сек
|
| 16.0 | 0.06 | |||
| 16.2 | 0.07 | |||
| 16.4 | 0.08 | |||
| 16.6 | 0.07 | |||
| 16.8 | 0.06 | |||
| 17.0 | 0.07 | |||
| 17.2 | 0.08 | |||
| 17.4 | 0.07 | |||
| 17.6 | 0.06 | |||
| 17.8 | 0.07 | |||
| 18.0 | 0.08 | |||
| 18.2 | 0.09 | |||
| 18.4 | 0.10 | |||
| 18.6 | 0.09 | |||
| 18.8 | 0.08 | |||
| 19.0 | 0.07 | |||
| 19.2 | 0.08 | |||
| 19.4 | 0.09 | |||
| 19.6 | 0.10 | |||
| 18.2 | 0.0694 |
[1] Численные значения,, и надо взять из таблицы в конце файла. Они должны совпадать с данными, которые использовались Вами в лабораторной работе № 2.
[2] При вводе этой и следующих команд окно с графиком не появляется на экране. Чтобы увидеть изменения, надо вручную сделать его активным, щелкнув мышью на соответствующей кнопке в панели задач.








