 2015-05-10
2015-05-10 1189
1189При проведении структурного анализа плоского механизма необходимо внимательно изучить модель механизма.
Механизм-система, определенным образом, взаимосвязанных тел (звеньев), предназначенная для преобразования заданных движений одного или нескольких тел в требуемое движение других тел.
Механизмы состоят из звеньев, соединенных между собой кинематическими парами.
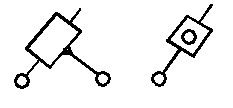
Звено - твердое тело, входящее в состав механизма (рис. 1)
Рис. 1. Звено механизма и его изображение
на кинематической схеме
Кинематическая пара - соединение двух соприкасающихся звеньев допускающее их относительное движение.
На кинематических схемах кинематические пары обозначают заглавными буквами латинского алфавита.
Классификация кинематических пар представлена в табл. 1.
В плоских механизмах используются кинематические пары, в основном, пятого и, иногда, четвертого классов, которые являются низшими, т.к. звенья в них соприкасаются по поверхности.
Рычажными называются механизмы, звенья которых образуют только низшие кинематические пары.
Систему звеньев, соединенных между собой кинематическими парами, называют кинематической цепью.
Звенья механизмов имеют определенные названия (рис. 2):
стойка – неподвижное звено или звено, принимаемое за неподвижное;
кривошип - звено рычажного механизма, образующее вращательную пару со стойкой и совершающее полный оборот вокруг своей оси;
коромысло - звено рычажного механизма, образующее вращательную пару со стойкой и совершающее неполный оборот вокруг своей оси;
шатун - звено рычажного механизма, образующее кинематические пары только с подвижными звеньями;
ползун - звено рычажного механизма, образующее поступательную пару со стойкой;
входным называется звено, совершающее движение, преобразуемое механизмом в требуемое движение других звеньев;
выходным называется звено, совершающее движение, для получения которого предназначен механизм;
ведущим называется звено, для которого элементарная работа действующих на него сил положительна;
ведомым называется звено, для которого элементарная работа действующих на него сил отрицательна или равна нулю.
Обычно входное звено ведущее, а выходное — ведомое.
Названия четырехзвенных рычажных механизмов образуются по названию входного и выходного звеньев: кривошипно-ползунный механизм (рис.2, а), кривошипно-коромысловый механизм (рис.2,б).
Структурный анализ механизмов предусматривает:
определение видового и количественного состава механизмов; подвижных звеньев, кинематических пар, цепей;
выделение и классификацию подвижных звеньев, кинематических пар, кинематических цепей, структурных групп механизмов;
определение числа степеней свободы (подвижности) механизма;
выявление и устранение избыточных связей;
нахождение избыточных (местных) степеней свободы.
Рис. 2 Схемы рычажных механизмов:
а) кривошипно-ползунный; б) кривошипно-коромысловый
Для определения числа степеней свободы плоского механизма используется структурная формула Чебышева:
W = 3 n - 2 p 5 - p 4,(1)
где W - число степеней свободы, т.е. число обобщенных координат (угол положения кривошипа - φ);
n - количество подвижных звеньев;
p 5, p 4 –число кинематических пар, соответственно,
пятого и четвертого классов.
Класс кинематической пары определяется числом связей (ограничений), накладываемых на одно-, двух подвижные пары (табл. 1).
Основной принцип образования плоских рычажных механизмов предложен Л.В. Ассуром в 1914 г.
Группой Ассура называется кинематическая цепь, присоединение которой к механизму не изменяет его числа степеней свободы.
Основные свойства группы:
– число степеней свободы W = 0;
– число звеньев — четное;
– число кинематических пар кратное трем (3,6,9...);
Структурные группы Ассура представлены в табл. 2.
Класс группы определяется по числу шарниров в замкнутом контуре. Группы второго класса приняты условно.
Порядок группы определяется по количеству поводков.
Поводок - звено группы Ассура, образующее низшие кинематические пары с другими звеньями, не входящими в данную группу Ассура.
При выполнении структурного анализа необходимо механизм расчленить на структурные группы Ассура, т.к. определение реакций в кинематических парах при силовом исследовании механизмов производят методом кинетостатики структурных групп.
Отделение структурных групп производят с наиболее удаленного звена от ведущего.
После отделения структурных групп должен остаться механизм первого класса, первого порядка (I класса, I порядка) (рис. 3), имеющий степень подвижности W = 1, образованный звеньями 0 и 1.
Формулу строения механизма записывают от начального звена (механизма I класса, I порядка), присоединяя последовательно структурные группы.
Например: I (0,1) ® II (2,3) ® III (4,5).
| | В механизмах могут иметь место избыточные связи, которые дублируют ограничения, наложенные другими связями, не изменяя при этом кинематические свойства механизма. Наличие в механизме избыточных связей имеет свои достоинства и недостатки. Избыточные связи повышают жесткость механизма, уменьшают его деформации, но при этом повышаются требования к точности изготовления звеньев механизма и элементов его кинематических пар, обращая механизм в статически неопределимую систему. |
При неточности изготовления плоского механизма оси шарниров могут оказаться не параллельными и механизм обращается в пространственный.
Количество избыточных (повторных, пассивных) связей определяют по формуле:
q = W - 6 n + 5 p 5 + 4 p 4 + 3 p 3 + 2 p 2 + p 1(2)
где W - степень подвижности механизма;
n - число подвижных звеньев;
p 5 - количество кинематических пар 5 класса;
p 4 - количество кинематических пар 4 класса;
p 3 - количество кинематических пар 3 класса;
p 2 - количество кинематических пар 2 класса;
p 1 - количество кинематических пар 1 класса.
Таблица 1
Классификация кинематических пар ГОСТ 2.770-68
| Число степеней свободы | Число уравнений геометри-ческих связей | Название пары | Рисунок | Условное обозначение |
| Поступательная |  |  | ||
| Вращательная |  |  | ||
| Винтовая |  |  | ||
| Цилиндрическая |  |  | ||
| Сферическая с пальцем |  |  | ||
| Сферическая |  |  | ||
| Плоскостная |  |  | ||
| Цилиндр-плоскость | 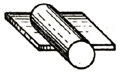 |  | ||
| Шар- плоскость |  |  |
Таблица 2
Структурные группы Ассура
| Класс | Поря-док | Вид | Схема | Число звеньев | Число пар пятого класса |
| II |  | ||||
 | |||||
 | |||||
| III | - | ||||
| - | |||||
| IV | - | ||||
| - | |||||
| V | - |
При проектировании механизмов и машин стремятся избавиться от избыточных связей введением в конструкцию механизма технологических зазоров. Для механизмов с жесткими звеньями этому конструктивному решению соответствует прием, связанный с повышением подвижности кинематических пар (например, вращательную пару заменить цилиндрической).
Структурная схема механизма — схема, указывающая стойку, подвижные звенья, виды кинематических пар и их взаимное расположение. Она может быть представлена графическим изображением с применением условных обозначений звеньев и кинематических пар.
Кинематическая схема механизма — это его структурная схема с указанием размеров звеньев, необходимых для кинематического анализа. Кинематическая схема не отражает внешних конструктивных форм механизма, но дает полное представление о характере движения звеньев и способе их соединения между собой.








