 2015-05-13
2015-05-13 2920
2920
Для изменения коэффициента или постоянной времени МУ применяют обратную связь. Обратная связь может быть отрицательной и положительной. Чаще всего в магнитных усилителях применяется положительная обратная связь, которая приводит к увеличению коэффициента усиления магнитного усилителя:
 ,
,
где β – коэффициент обратной связи.
По способу осуществления обратная связь может быть внешней (рис. 3.32), когда в усилителе имеется специальная обмотка обратной связи w ос, и внутренней (рис. 3.33), если обмотка обратной связи отсутствует.
Магнитные усилители имеют ряд достоинств. К ним относятся: отсутствие подвижных частей, прочность и высокая надежность, высокий коэффициент усиления по мощности, простота суммирования нескольких сигналов, быстрая готовность после включения, относительно высокий КПД. В маломощных усилителях КПД имеет значение η» 0,5, в то время как в мощных МУ η = 0,94¸0,95.
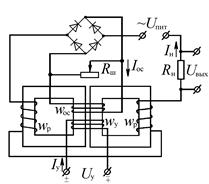 | 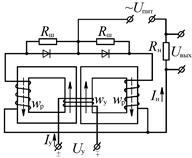 |
| Рис. 3.32. Однотактный усилитель с внешней обратной связью | Рис. 3.33. Однотактный усилитель с внутренней обратной связью |
Коэффициент полезного действия МУ учитывает потери мощности в рабочих обмотках усилителя:
 .
.
Основным недостатком магнитных усилителей является их инерционность. Передаточную функцию МУ можно представить в виде
W (p) = U н(p) / U y(p) = kU / (T y p + 1),
т. е. МУ как элемент автоматики является апериодическим звеном. Постоянная времени реального МУ с учетом активного сопротивления рабочих обмоток R р и КПД рабочей цепи η будет равна:
Увеличение коэффициента усиления по мощности kP при данной частоте f приводит к повышению постоянной времени Т у.Уменьшить Т упри данном kР можно путем увеличения частоты источника питания.
3.2. Релейные элементы
систем автоматики
К релейным элементам автоматики (реле)относятся устройства, преобразующие плавное изменение входной величины в скачкообразное изменение выходной. Реле широко применяют в системах автоматики в качестве элементов управления и защиты, дискретных датчиков и усилителей, размножителей сигналов и логических элементов, в электрических установках, при автоматическом управлении и регулировании различных технологических процессов.
Реле классифицируют по различным признакам: по виду физических величин, поступающих на вход реле, – электрические и неэлектрические; по назначению – реле управления, защиты, сигнализации, связи и т. д.; по принципу воздействия на выходную цепь – контактные и бесконтактные; по роду величины, на которую реагирует реле, – реле токовые, напряжения, мощности, частоты, сопротивления и т. д.; по исполнению – реле открытые, с защитным чехлом, пылебрызгозащищенные и герметические.
Из электрических реле в современных дискретных системах автоматики широко используют электромеханические реле, являющиеся контактными устройствами, магнитные, электронные (ламповые) и полупроводниковые реле, являющиеся бесконтактными устройствами.
В контактных реле скачкообразное изменение выходной величины достигается замыканием или размыканием выходной цепи; в бесконтактных реле – путем резкого изменения параметров выходной цепи (R, L, С).
Основной характеристикой реле является статическая характеристика (характеристика управления),выражающая зависимость выходной величины у от входной х. Для статических характеристик большинства реле характерным является наличие гистерезисной релейной петли, объясняющейся неоднозначностью характеристик при увеличении и уменьшении входного сигнала.
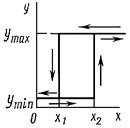
Основные виды статических характеристик реле приведены на рис. 3.34, из которых видно, что при достижении входной величиной х определенного значения происходит скачкообразное изменение выходной величины у. Характеристики на рис. 3.34, а, б принадлежат двухпозиционным нейтральным реле, не реагирующим на знак входного сигнала. При изменении входного сигнала от 0 до х 2(рис. 3.34, а) реле не изменяет своего состояния. При достижении входным сигналом значения х 2(параметр срабатывания) выходной сигнал у скачкообразно изменяется от y minдо y max.Дальнейшее увеличение входного сигнала не изменяет величину выходного сигнала, т. е. y = y max = const. При уменьшении входного сигнала от значения х > х 2до значения х = x 1величина выходного сигнала не изменяется, т. е. у = y max,а при достижении входным сигналом значения x 1(параметр отпускания) выходная величина скачкообразно изменится от y max до y min.

а б в


г д
Рис. 3.34. Виды статических характеристик релейных элементов
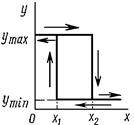
Отличием устройств, имеющих характеристику, изображенную на рис. 3.34, б,от рассмотренной на рис. 3.34, a является инвертирование сигнала. При отсутствии входного сигнала (х = 0) величина выходного у = y max; при наличии входного сигнала (x = x 2)выходной сигнал отсутствует или имеет минимальное значение (у = y min). Характеристика двухпозиционных релейных устройств, обладающих двумя устойчивыми состояниями, приведена на рис. 3.34, в. При снятии входного сигнала (х = 0) реле останется в состоянии, в котором находилось до этого. Отличием этой зависимости (рис, 3.34, в) является ее реверсивный характер – при изменении знака сигнала на входе меняется знак сигнала на выходе.
На рис. 3.34, г, д представлены характеристики трехпозиционных релейных элементов с зоной нечувствительности, а для рис. 3.34, г еще и с неоднозначной зависимостью сигнала на выходе от входного сигнала.
К основным характеристикам реле также относятся:
мощность срабатывания Р ср – это минимальная мощность, потребляемая катушкой реле при срабатывании;
выходная, или коммутируемая, мощность Р вых – это произведение максимального отключаемого тока на напряжение источника питания выходной цепи;
время срабатывания t ср – это время от момента подачи на вход реле управляющего сигнала до появления (исчезновения) сигнала на выходе (замыкания или размыкания выходных контактов);
время отпускания t отп – это время от момента снятия входного сигнала до размыкания (замыкания) выходных цепей, равное времени трогания и времени движения якоря, т. е. t отп = t тр + t дв;
коэффициент возврата реле k взв есть отношение параметра отпускания реле к параметру срабатывания (k взв = x отп / х ср < 1). Коэффициент возврата характеризует относительную ширину релейной петли статической характеристики;
коэффициент запаса k зап – это отношение магнитодвижущей силы (МДС) катушки реле при установившемся режиме к МДС при токе срабатывания, т. е. k зап = I уст w р / (I ср w р);
коэффициент управления (усиления) ky есть отношение максимального значения выходного сигнала к входному при срабатывании, т. е. ky = у max / х cp.
При выборе типа реле принимают во внимание все указанные характеристики и параметры, отдавая предпочтение тем, которые внаибольшей степени удовлетворяют требованиям разрабатываемого устройства и условиям его эксплуатации.

