 2015-07-14
2015-07-14 881
881| 1. | Трьохфазний асинхронний двигун з КЗ ротором має швидкість обертання n 1 = 1425 об/хв. Розрахувати ковзання S %. |
Билет 7
1 Стійкість імпульсних систем.
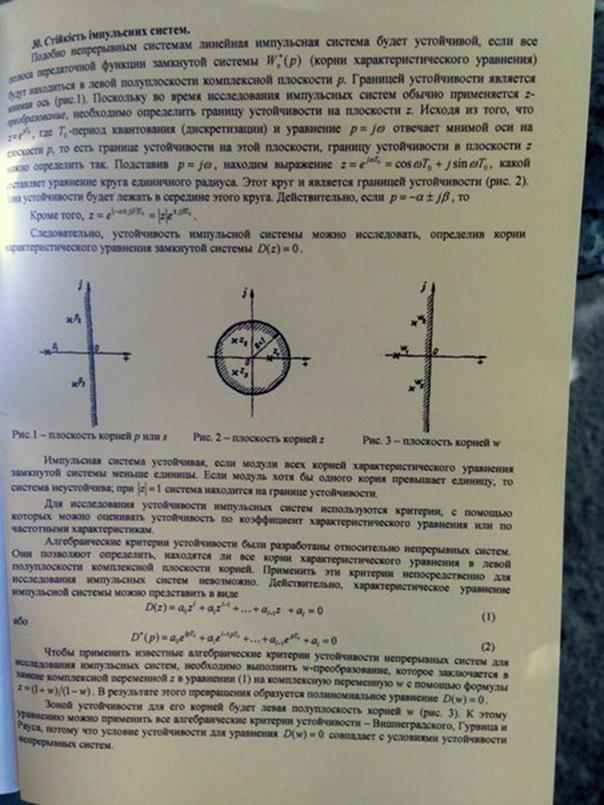
2 Частотне регулювання кутової швидкості асинхронних двигунів.
В частотно-регульованих електроприводах можна використовувати двигуни загального призначення. При цьому дещо знижуються їх техніко-економічні показники.
Частотно-регульовані асинхронні двигуни, як правило, працюють з регуляторами напруги або магнітного потоку, що дозволяє забезпечити сталу роботу електропривода. Отже, ці двигуни можуть мати дещо знижену перевантажувальну здатність.
При пуску двигуна в частотно-регульованому приводі в деяких випадках є можливість здійснювати пуск з початковим ковзанням вище критичного, що не вимагає при проектуванні частотно-регульованих двигунів дотримуватись заданих значень пускового і мінімального моментів, пускового струму. В зв'язку з цим ротор може мати обмотку з меншим активним опором і, як наслідок, з більшим коефіцієнтом корисної дії. Тому частотно-регульовані двигуни проектують без урахування пускових характеристик, які забезпечуються системою керування.
До двигунів загального призначення ставляться підвищені вимоги щодо вибору номінального ковзання при паралельній їх роботі. У зв'язку з тим, що частотно-регульовані двигуни одержують живлення кожен від індивідуального перетворювача частоти, навантаження між паралельно працюючими двигунами узгоджується системою керування. Тому певних вимог до розрахункового ковзання двигунів не існує.
Оскільки частотно-регульовані двигуни можуть працювати при знижених швидкостях обертання, вони мають незалежну систему вентиляції.
Для сільськогосподарських машин і агрегатів розроблені частотно-регульовані двигуни з межами регулювання частоти 5-60 Гц, а напруги 30 - 380 В.
Енергетичні показники двигунів, що працюють від перетворювачів частоти, нижчі ніж двигунів, що працюють від мережі. Коефіцієнти корисної дії знижуються в середньому на 2-3 %, а cosφ — на 5 %. Корисна потужність асинхронного двигуна знижується на 10 — 25 %, а максимальний момент — на 8 — 15%. Обертання двигуна в зоні переривчастих струмів стає дискретним, що знижує діапазон регулювання.
Зміна частоти струму живлення дає можливість змінювати швидкість обертання двигуна в зоні малих ковзань, а значить і малих втратах енергії в роторному колі. Отже, частотне регулювання швидкості асинхронних двигунів характеризується досить високим коефіцієнтом корисної дії. Система частотного регулювання забезпечує високу плавність в досить широкому діапазоні, а штучні механічні характеристики мають високий модуль жорсткості.
При регулюванні частоти струму на затискачах двигуна змінюються його параметри. Так, при зниженні частоти і незмінній напрузі збільшується струм намагнічування і, як наслідок, зростає магнітний потік. Збільшення частоти струму призводить до зменшення струму і магнітного потоку двигуна. При незмінному статичному моменті на валу двигуна зростає струм ротора і його температурний режим виходить за межі допустимого. Регулювання частоти струму вимагає одночасного регулювання напруги.
Частотно-регульовані приводи дають можливість регулювати швидкість обертання вверх від номінального значення і вниз. Верхня межа регулювання швидкості обмежується механічною міцністю ротора. Збільшення швидкості обертання відносно номінальної не повинно бути більше ніж у два рази. Мінімальна швидкість обертання обмежується нестабільною роботою перетворювача при низьких частотах.
При регулюванні частоти струму в приводах з різними механічними характеристиками робочої машини напругу на виході перетворювача частоти змінюють виходячи з умови збереження перевантажувальної здатності двигуна:
 .
.
Як відомо, максимальний момент двигуна становить:
 .
.
Механічна характеристика робочої машини описується емпіричною формулою:
 ,
,
де  - момент опору при швидкості
- момент опору при швидкості  , Нм;
, Нм;  - момент опору тертя в рухомих частинах, який не залежить від швидкості, Нм;
- момент опору тертя в рухомих частинах, який не залежить від швидкості, Нм;  - момент опору при швидкості
- момент опору при швидкості  , Нм;
, Нм;  - показник степеня, що характеризує зміну статичного моменту при зміні швидкості.
- показник степеня, що характеризує зміну статичного моменту при зміні швидкості.
Перевантажувальна здатність двигуна при різних частотах струму має вигляд:
 .
.
У відносних одиницях має вигляд:
 .
.
де  — відповідно напруга, частота струму і статичний момент, у відносних одиницях.
— відповідно напруга, частота струму і статичний момент, у відносних одиницях.
Статичний момент робочої машини у відносних одиницях, якщо зробити припущення, що = 0, записується:
 .
.
Тому:
 ,
,
де - показник степеня в механічній характеристиці робочої машини.
Для робочої машини, що має показник степеня х = 0, закон зміни напруги характеризується виразом:
 .
.
При х = -1 залежність напруги від частоти струму на затискачах двигуна описуються залежністю:
 .
.
При вентиляторному навантаженні (х = 2):
 .
.
Механічні характеристики двигуна при частотному регулюванні швидкості обертання робочих машин з різними механічними характеристиками наведені на рис. 1 (при R1 = 0).
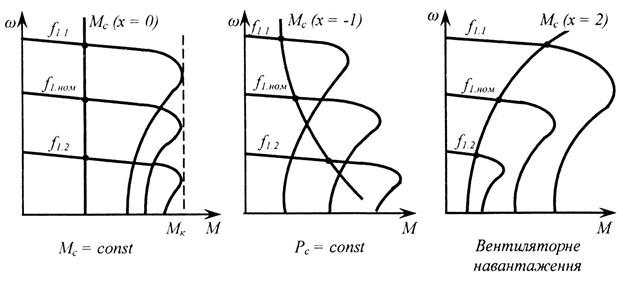
Рис. 4.43. Механічні характеристики асинхронного двигуна при частотному регулюванні швидкості
3 Технічна експлуатація рульових електроприводів. Підготовка РЕП до виходу в рейс, обслуговування РЕП на ходу судна. Правила технічної експлуатації авторульових, налаштування і регулювання авторульових.








