 2015-08-21
2015-08-21 722
722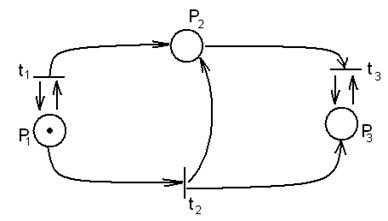
P1 P2 P3
1 0 0 (1,0,0)
Здесь разрешено всё: t1 и t2 Так как мы хотим рассмотреть все ситуации, то проделаем это для обоих переходов.
Построение дерева достижимости.
Шаг 1
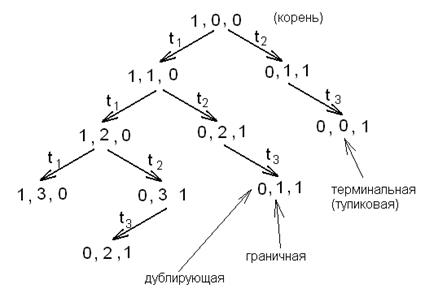
Здесь вершинами будут различные достижимые маркировки, а дугами – переходы. Теперь необходимо рассмотреть все маркировка, достижимых из таких маркировок. Можно снова запустить t1 и t2. После этого можно продолжать маркировку. Однако заметим, что маркировка (0,0,1) – это маркировка пассивная, то есть из нее никакие маркировки порождаться не будут. Отметим, что маркировка (0,1,1), порождаемая запуском t3, из маркировки (0,2,1) по дуге t3 уже была в дереве (она была порождена t2), то есть произошло дублирование. Тогда, если продолжать построение дерева, то это дерево достижимости может оказаться бесконечным. Кстати, конечная сеть Петри может иметь бесконечное дерево.
Например:
Есть несколько средств ограничения такого дерева, то есть показать бесполезность его продолжения.
Введем некоторые понятия по дереву достижимости:
В этом дереве вершины – это последовательность маркировок  …
…
Дуги – переходы
1) Начало дерева – корневая вершина
2) Граничная вершина – это новая вершина, получающаяся из старой маркировки (1,3,0;0,3,1)
3) Терминальные вершины – пассивные вершины, когда нет разрешенных переходов (0,0,1)
4) Дублирующие вершины – вершины с маркировками, которые уже встречались в дереве (0,1,1)
В рассмотренном примере видно, что ряд граничных вершин порождал новые граничные, то есть шло построение новой маркировки ( ), в которой в одной или в нескольких позициях количество фишек постоянно увеличивается (не принося никакой новой информации).
), в которой в одной или в нескольких позициях количество фишек постоянно увеличивается (не принося никакой новой информации).
Отсюда вводится понятие бесконечность (бесконечное число фишек в позиции) – специальный символ  .
.



Каждая вершина, получившая в позиции, порождает такую же .
Задача
Задана система – некий автомат и оператор. Автоматы срабатывают под управлением оператора. В системе заданы три автомата:  ,
,  ; и два оператора
; и два оператора  ,
,  .
.
Оператор может работать с автоматами  и
и  .
.
Оператор может обслуживать автоматы и .
В этой системе выполняются некоторые заказы. Эти заказы требуют двух стадий обработки:
1. Сначала на
2. Затем на и
Запишем условия:
а) Заказ прибыл и ждет обработки на
б) Заказ обработан на и ждет (все еще) либо , либо
в) Заказ выполнен
г) не занят
д) не занят
е) не занят
ж) не занят
з) не занят
и) находится под воздействием (связан с ним)
к) под воздействием
л) под воздействием
м) под воздействием
При этом могут происходить следующие события:
1. Заказ поступил
2. начинает выполнение заказа на
3. закончил выполнение заказа на
4. начинает выполнение заказа на
5. заканчивает выполнение заказа на
6. начинает выполнение заказа на
7. заканчивает выполнение заказа на
8. начал выполнение заказа на
9. закончил выполнение заказа на
10. Заказ отправляется на доставку (включен некий транспортер)
Запишем сказанное, сопоставив события и условия, в том числе определим предусловия и постусловия.
| События | Условия | |
| Предусловия | Постусловия | |
| Нет | а | |
| а, ж, г | и | |
| и | ж, г, б | |
| а, з, г | к | |
| к | б, з, г | |
| б, ж, д | л | |
| л | в, ж, д | |
| б, е, з | м | |
| м | в, е, з | |
| в | нет |
Сопоставим символьное обозначение условий с математическими переменными, для чего:
| символьное обозначение условия | математические переменные | позиции | ||
| а | 
| 
| 
| 
|
| б | 
| 
| 
| 
|
| в | 
| 
| 
| 
|
| г | 
| 
| 
| 
|
| д | 
| 
| 
| 
|
| е | 
| 
| 
| 
|
| ж | 
| 
| 
| 
|
| з | 
| 
| 
| 
|
| и | 
| 
| 
| 
|
| к | 
| 
| 
| 
|
| л | 
| 
| 
| 
|
| м | 
| 
| 
| 
|
| События | математическое обозначение | переходы |

| 
| |

| 
| |

| 
| |

| 
| |

| 
| |

| 
| |

| 
| |

| 
| |

| 
| |

| 
|
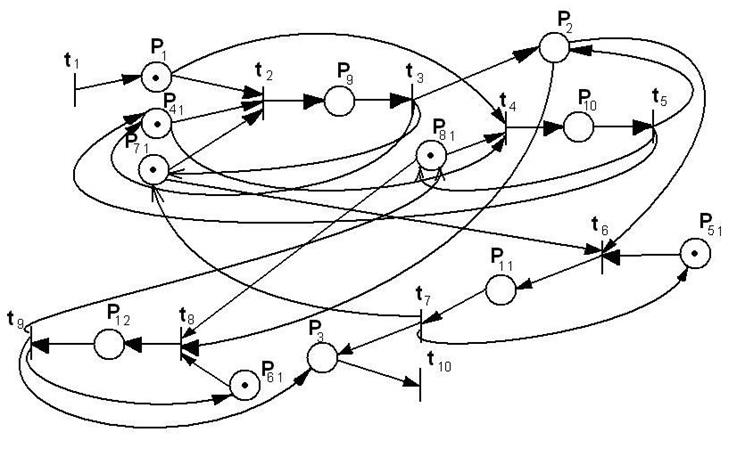
Упрощенная математическая модель










Таблица запуска переходов:
|
|
|
|
|
|
|
|
|
|
|
|
| ||
 , , 
| |||||||||||||
, 
| |||||||||||||
| ,
| |||||||||||||
| , , , , ,
| |||||||||||||
| , , , ,
| |||||||||||||
| , ,
| |||||||||||||
| , ,
| |||||||||||||
| , , ,
| |||||||||||||
| , ,
| |||||||||||||
| ,
| |||||||||||||
| ,
| |||||||||||||
|
| |||||||||||||
Алгоритм построения дерева достижимости
Каждая вершина i – дерева связывается с расширенной маркировкой  , где может быть либо неотрицательное целое, либо «сиськи». Каждая вершина классифицируется как граничная, или терминальная, или дублирующая, или внутренняя.
, где может быть либо неотрицательное целое, либо «сиськи». Каждая вершина классифицируется как граничная, или терминальная, или дублирующая, или внутренняя.
Граничными являются вершины еще не обработанные алгоритмом. Алгоритм превратит их в или в терминальные, или в дублирующие, или во внутренние вершины. Алгоритм начинается с определения начальной маркировки корня дерева, который является пока так же граничной вершиной. До тех пор пока имеются граничные вершины, они обрабатываются алгоритмом. Пусть х – некоторая граничная вершина исходного i – дерева, которую необходимо обработать и сделать из него “буратино”:
1) Если в дереве имеется другая вершина у, не являющаяся граничной и с ней связана та же маркировка, то есть  , то вершина х.й – дублирующая
, то вершина х.й – дублирующая
2) Если на маркировке  ни один из переходов не разрешен, то есть
ни один из переходов не разрешен, то есть  Ø для всех
Ø для всех  , то х – терминальная (тупиковая) вершина.
, то х – терминальная (тупиковая) вершина.
3) Для всякого перехода разрешенного в , то есть  Ø
Ø  , то можно создать новую вершину z –дерева достижимости. Маркировка z, связанная с вершиной z-дерева, определяется для каждой позиции, то есть
, то можно создать новую вершину z –дерева достижимости. Маркировка z, связанная с вершиной z-дерева, определяется для каждой позиции, то есть  определяется следующим образом:
определяется следующим образом:
А) если  = , то =
= , то =
Б) если на пути от корневой вершины к вершине х существует вершина у, такая, что  и
и  , то =
, то =
Путь – это последовательность вершин и дуг до исходной вершины.
В) в противном случае мы говорим, что 
Итак, когда увсе вершины казутся терминальными, дублирующими и внутренними – алгоритмос останавливается.
Управление в системах реального времени (некоторые подходы)
Например, система управления (СУ) КА должна принимать информацию от оборудования и выдавать управляющие сигналы оборудованию. Составим пример упрощенной логической математической модели управления:
У1={ }
у3=…
х1…хn – входные сигналы в ПоПКу
у1…уm – выходной сигнал из ПоПКи
В СРВ (системах реального времени), то есть системе управления технологическим оборудованием, бортовыми исполнительными системами и др., СУ верхнего уровня должна видимо принимать системы:
а) в произвольные моменты времени пукаем.
б) в заданные мо-ментов, определяемые например циклограммой.
Сигналы от оборудования могут приходить как результаты предыдущих команд контроллера. Так, контроллер, если была дана команда станку уi-1 – начать обработку детали, то ответным сигналом от этого станка будет сигнал хk, извещающий об окончании работы.
Таким образом, циклограмма отслеживается самим оборудованием (СЧПУ), а ПЛК выставляет у себя контрольное время прихода подтверждающих (ответными по окончании действия станка) сигналов, таймируя время. Выдавая некую команду оборудованию, ПЛК запускает один из таймеров.
P.S. под редакцией 13.С.С.








