 2015-09-07
2015-09-07 510
510Развитие средств вычислительной техники и силовой электроники в последние десятилетия привело к тому, что появились новые возможности управления АД. В дополнение к модульному и трансвекторному способам был разработан и с середины 90-х годов реализован в серийных изделиях фирмы ABB способ так называемого прямого управления моментом (DTC – direct torque control). В основу работы системы DTC положено уравнение электромагнитного момента АД.

|
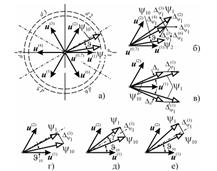
| Рис. 6.1. Состояния векторов системы прямого управления моментом АД. |
где  – пространственный угол между векторами потокосцеплений
статора – пространственный угол между векторами потокосцеплений
статора  и ротора и ротора  .
Если модули векторов .
Если модули векторов  и и  поддерживать постоянными, то величиной момента можно управлять, изменяя угол .
При питании АД от инвертора напряжения в
зависимости от состояния ключей возможно
формирование восьми
пространственных векторов
поддерживать постоянными, то величиной момента можно управлять, изменяя угол .
При питании АД от инвертора напряжения в
зависимости от состояния ключей возможно
формирование восьми
пространственных векторов  … …  (рис. 6.1 а), называемых базовыми. (рис. 6.1 а), называемых базовыми.
|
Причем, векторы и являются нулевыми и соответствуют короткому замыканию обмоток статора чётными или нечётными ключами.
Из уравнения статора АД в неподвижной системе координат можно определить связь между векторами напряжения и потокосцепления

.
Полагая  и переходя к конечным разностям, получим
и переходя к конечным разностям, получим
 .
.
Таким образом, вектор приращения потокосцепления статора  совпадает по направлению с вектором напряжения
совпадает по направлению с вектором напряжения  и пропорционален длительности его формирования. Для интервала времени, в котором формируется
и пропорционален длительности его формирования. Для интервала времени, в котором формируется  -й базовый вектор можно записать
-й базовый вектор можно записать

где  и
и  – начальное и конечное значения вектора потокосцепления статора.
– начальное и конечное значения вектора потокосцепления статора.
Выбор базового вектора минимизирующего ошибку регулируемых величин в зависимости от сектора, в котором в данный момент находится вектор , можно
производить, например, с помощью заранее составленной таблицы формирования базовых векторов.








