 2014-02-02
2014-02-02 610
610Оптимизация конструкции заключается в отыскании мума одного показателя качества или их совокупностей. В первом случае оптимизацию называют скалярной, а во втором - векторной, Кроме того, в зависимости от характера исходных данных различают или детерминированный случай, или оптимизацию в условиях неопределенности.
Если условия задачи и ограничения заранее известны, то задача сводится к детерминированному случаю, а если часть условий неизвестна, то такую задачу оптимизации относят к случаю ее решения в условиях неопределенности,
Условиями задачи будем называть те исходные данные, которые заданы и мы изменять их не можем. Условиями могут быть показатели качества, параметры конструкции, воздействия и т. д. В процессе оптимизации, с учетом заданных условий, мы должны найти элементы решения, т. с. те параметры кона рукции и показатели качества, которые зависят от нашего выбора и которые приводят к отысканию оптимальных конструкций.
Обычно в задачах оптимизации ищется экстремум интегрального показателя или целевой функции, которая в общем случае является функцией многих аргументов. Она задается в некоторой области значений переменных. Наименьшее или наибольшее значение целевой функции из всех возможных в заданной области называют глобальным экстремумом. Если в заданной области существуют экстремумы, меньше глобального, то их называют локальными.
Экстремумы называют граничными, если они находятся на границах области задания целевой функции. В том случае, если область не ограничена, т. е. элементы решения xi не имеют ограничений, то экстремумы называют безусловными.
При ограниченной области задания целевой функции экстремумы называют условными.
Если целевая функция зависит от n-переменных, то условием существования экстремума является равенство нулю всех частных первых производных от целевой функции. Полученная экстремальная точка называется стационарной.
При этом математическая модель целевой функции известна или задана. Предположим, что обобщенным показателем качества является эффективность Кэф.
Заданы исходные данные или условия αi, на которые конструктор опирается в процессе работы как на константы и изменять их не может.
Требуется найти элементы решения xi т. е. величины, зависящие от его выбора.
Условиями и элементами решения могут быть не только константы, но и функции.
Предположим, что оптимизируется показатель качества Kэф:
К эф = К (α1,…, αn, x1, …, xi, …, xm).
Задача оптимизации сводится к отысканию таких xi, которые обращают Kэф в максимум.
Простейшим методом решения этой задачи, как отмечалось ранее, является отыскание экстремума путем взятия производных от Kэф по аргументам xi. Приравнивая производные нулю, I чим систему уравнений, из которой можно найти ний xi: ∂Kэф/∂x1 = 0, …, ∂Kэф/∂xm = 0.
Однако такая простая методика применяется для нахождения оптимальных решений в том случае, когда существуют экстремумы и производные, т.е. функция эффективности не имеет особенностей. В практических задачах часто экстремумы находятся па границе допустимых решении.
Для некоторых задач оптимизации необходимо использовать векторную оптимизацию, т. е. находить оптимальное решение по нескольким показателям. Эта задача характерна для случая, когда показатели качества противоречивы, например надежность и стоимость, прочность и габаритно-массовый показатель и т. д.
Предположим, что отыскивается оптимальное решение в области двух конфликтующих параметров, например стоимости и надежности. Последовательно задаваясь элементами решений xi находим наиболее приемлемые их значения. Допустим, что нам известна допустимая область изменения элементов стоимости и надежности. Задаваясь дискретными значениями элементов решения, найдем значения показателей стоимости С и надежности Р. Все полученные решения сведем в табл. 3.1. Предполагается, что известна функциональная зависимость между С и Р.
Таблица 3.1
| Показатель качества | Элементы решения х решения х |
| x1...... xn | |
| Значения С | C1...... Cn |
| Значения Р | P1...... Pn |
Максимальные значения надежности и соответствующие минимальные значения стоимости дают оптимальные решения.
Для большей наглядности изобразим полученные решения на графике (рис. 3.1) в координатах С и Р. Очерченная область заключает в себе желаемые решения.
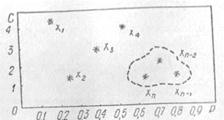
Рис. 3.1. График, поясняющий нахож дение области оптимальны решений при противоречивых параметрах С и Р
Если оптимизация производится по n параметрам, то аналогично предыдущему случаю строят таблицу и находят область (пространство) допустимых решений. При этом исключают те решения, которые выходят за рамки ограничений.
Математическая модель задачи оптимизации независимо от уровня оптимизируемого конструктивного модуля при детерминированном случае записывается в виде max К = φ (А, X); min К = φ (А, X), или


где К - оптимизируемая целевая функция; А - известные заданные условия; Х—элементы решения.
На условия и на элементы решения наложены ограничения
 .
.
где Xj, Aj - наложенные ограничения.
В зависимости от структуры оптимизируемой целвой функции могут использоваться различные методы оптимизации.
Если, например, целевая функция зависит линейно от условий и элементов решения, то с успехом используется линейное программирование, если эта зависимость нелинейна, то методы нелинейного программирования и т. д. Следовательно, метод программирования определяется видом целевой функции и ограничений.
В дальнейшем в целях удобства изложения иногда вместо показателей качества или целевых функций употребляем термин «критерий». Аргументом в пользу такого перехода служит то, что критериями могут быть и не обязательно показатели качества.
Рассмотрим некоторые возможности объединения показате-лей качества или критериев в один общий критерий К0. Эту операцию называют приведением многокритериальной задачи к задаче скалярной оптимизации.
Простейшим методом объединения критериев является их суммирование с учетом весов Wi К0 = ∑ WiKi, где n — количество объединяемых критериев; Wi — весовой коэффициент.
При объединении критериев подразумевается, что они приведены к единой шкале. Кроме того, должно выполняться условие Ki≥Kiд. Это условие налагается при невозможности «перекомпенсации» одних критериев за счет других.
Весовые коэффициенты определяются одним из методов, рассмотренных в 1.3, а приведение к единой шкале осуществляется путем выражения критериев в относительных значениях, т. е. их нормированием относительно допустимых значений Kiд.
С учетом изложенных замечаний оптимизируется зависимость вида
Вторым методом объединения критериев в один общий является представление их в виде произведения. Этот метод применяют в том случае, когда отдельные критерии безразмерны, например представлены в виде вероятностей.
При этом максимизируется функция
 .
.
Примером такого объединения критериев может служить оценка вероятности выполнения задачи.
При наличии противоречивых критериев, т.е. когда один из них необходимо максимизировать, а другие минимизировать, возможно использование критериев вида

В данном случае i-е показатели максимизируются, а j-е минимизируются.
Приведенные примеры формирования обобщенного критерия не ограничивают возможность представления Ко в другом виде. Здесь показаны наиболее общие принципы построения обобщенного критерия без учета физической сущности оптимизируемых объектов или процессов.








