 2014-02-24
2014-02-24 606
606Замечание
Иногда определяют как время изменения выходной величины на 1 % при отклонении входной величины от заданного значения на 1 %.
определяют как время изменения выходной величины на 1 % при отклонении входной величины от заданного значения на 1 %.
Интегральный закон регулирования можно записать в другой форме:

из которой видно, что скорость изменения регулирующего воздействия пропорциональна ошибке.
Для использования преимуществ пропорционального и интегрального регулирования в системах автоматического регулирования широко применяются регуляторы, формирующие одновременно пропорциональную и интегральную составляющие. Такие регуляторы называются пропорционально-интегральными (ПИ-регуляторами).
Взаимосвязь между ошибкой регулирования и управляющим воздействием, формируемым ПИ-регулятором, описывается уравнением

Параметрами настройки ПИ-регулятора являются: коэффициент усиления (пропорциональности) и постоянная времени интегрирования
и постоянная времени интегрирования или время изодрома
или время изодрома
Структурную схему ПИ-регулятора можно представить в виде параллельного соединения пропорционального и интегрирующего звеньев (рис. 53, а). Другая возможная структура ПИ-регулятора — со взаимозависимыми параметрами настройки — приведена на рис. 53, б. В регуляторах такого типа при настройке коэффициента усиления регулятора изменяется и постоянная времени интегрирования
изменяется и постоянная времени интегрирования
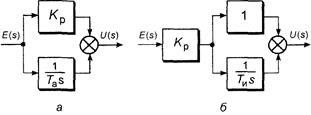
Рис. 53. Структурная схема ПИ-регулятора: а — с независимыми параметрами настройки; б — с взаимозависимыми параметрами настройки
Передаточная функция ПИ-регулятора









