 2015-03-08
2015-03-08 776
776Для плоской системы сил, если выбрать ось Oz перпендикулярно к плоскости действия сил, а оси Ox и Oy в плоскости сил, то главный вектор  лежит в плоскости Oyx, следовательно:
лежит в плоскости Oyx, следовательно:


 (2.1)
(2.1)

Главный момент плоской системы сил перпендикулярен главному вектору, то есть параллелен оси Oz. Тогда:
 ;
;  ;
;  (2.2)
(2.2)
Из уравнений (2.1) и (2.2) можно получить уравнения равновесия плоской системы сил.
 ;
;  ;
;  (2.3)
(2.3)
Таким образом, для равновесия плоской системы сил необходимо и достаточно, чтобы сумма проекций сил на каждую из двух взаимно перпендикулярных осей координат, лежащих в плоскости действия сил, равнялась нулю, и сумма моментов сил относительно любой точки, лежащей в плоскости действия сил, также равнялась нулю.
Существуют ещё две эквивалентные формы необходимых и достаточных условий равновесия плоской системы сил.
Для равновесия плоской системы сил необходимо и достаточно, чтобы сумма моментов сил относительно двух любых точек, лежащих в плоскости действия сил, равнялась нулю и алгебраическая сумма проекций этих сил на какую-либо ось, не перпендикулярную к прямой, проходящей через моментальные точки, также равнялась нулю.
 ;
;  ;
;  (2.4)
(2.4)
где ось Ox не перпендикулярна к AB.
Для равновесия плоской системы сил необходимо и достаточно, чтобы суммы моментов сил системы относительно трёх любых точек, расположенных в плоскости действия сил и не лежащих на одной прямой, равнялись нулю:
 (2.5)
(2.5)
Рассмотрим решение задач на равновесие плоской системы сил на конкретных примерах.
При изучении раздела «Кинематика» и решении задач необходимо изучить способы задания движения точки (векторный; координатный; естественный) и определение скоростей и ускорений при различных способах задания движения.
Координатный:
скорость
ускорение

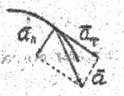
Естественный:
Скорость

ускорение
 ;
;
Необходимо знать, как определяются угловые и линейные характеристики при вращательном движении тела:
для тела угловая скорость и угловое ускорение
скорость и ускорение точки тела

При решении задачи K-3 на тему «Сложное движение точки» необходимо сначала установить относительное, переносное и абсолютное движения.
Определяя, например, характеристики относительного движения, нужно в это время остановить переносное движение точки и наоборот.
Скорость в сложном движении

ускорение
где  - кориолисово ускорение.
- кориолисово ускорение.
 или
или 
Одним из важнейших видов движения, изучаемых в технике, является плоскопараллельное движение тел. При изучении этого движения необходимо знать зависимость величины скоростей точек плоской фигуры к расстояниям до мгновенного центра скоростей.
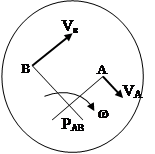

В каждый момент времени при плоском движении фигуры в ее плоскости, если ω≠0, имеется единственная точка, скорость которой равна нулю в данный момент времени. Эту точку называют мгновенным центром скоростей, обозначают ее буквой Р.
Если мгновенный центр известен, то, приняв его за полюс, получим
VB = ω·BPAB, причем 
Ускорение какой-либо точки плоской фигуры при плоском движении фигуры равно векторной сумме ускорения полюса и ускорения этой токи от вращательного движения плоской фигуры вокруг полюса.
 ,
,
причем 








