 2015-04-12
2015-04-12 436
436Система автоматического регулирования с параллельным корректирующим устройством выполнена в соответствии со схемой, приведенной на рис. 2.1.
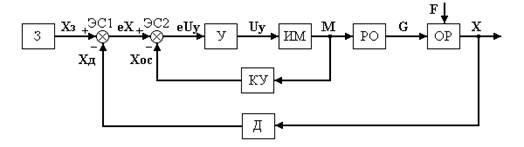
Рис. 2.1 Функциональная схема САР с параллельным
корректирующим устройством.
Важной особенностью САР с параллельными КУ является возможность использования в них усилителей с большими коэффициентами усиления без потери качества работы системы.
Тогда при больших значениях Ку малые изменения сигнала отклонения еХ вызывают большие изменения сигнала на выходе усилителя и большие перестановочные усилия на ИМ и РО. В этом случае уменьшается вредное влияние сил трения и зазоров в ИМ и РО на работу регулятора, которые могут увеличиваться в процессе эксплуатации регулятора.
Вместе с тем, в регуляторах с параллельными КУ затруднено применение унифицированных элементов автоматики, включая электронные и микропроцессорные средства. По этим причинам применение данных регуляторах на судах в настоящее время существенно ограничено.

Рис. 2.3 Структурная схема САР с параллельным КУ.
Заменим блоки, составляющие регулятор, (рис. 2.3) одним звеном, тогда структурная схема САР примет вид, показанный на рис. 2.4.
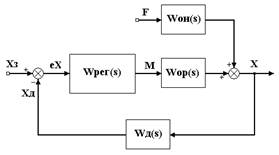
Рис. 2.4 Преобразованная структурная схема САР с параллельным КУ.
Передаточная функция регулятора определится по правилу преобразования структурных схем для контура с отрицательной обратной связью [8]:
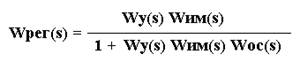 |








