2015-05-10
2015-05-10 634
634Лабораторная работа № 5
СТРУКТУРНО-КОНСТРУКТИВНАЯ КЛАССИФИКАЦИЯ МЕХАНИЗМОВ
ЦЕЛЬ РАБОТЫ
[1] Изучение условных обозначений звеньев, кинематических пар механизмов согласно ГОСТ 8.770 — 66.
[1] Знакомство с устройством и принципом действия механизмов в соответствии с их структурно-конструктивной классификацией.
[1] Составлениекинетических схем.
МАТЕРИАЛЬНОЕ ОСНАЩЕНИЕ
Для выполнения лабораторной работы используются модели рычажных, кулачковых, фрикционных, винтовых, клиновых, зубчатых механизмов, а также механизмов с гибкими связями.
КРАТКИЕ ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
Механизмом называется система тел, предназначенная для преобразования движения одного или нескольких твердых тел в требуемые движения других твердых тел.
В машиностроении и приборостроении находит применение большое количество самых разнообразных механизмов, различных по конструктивным и функциональным особенностям.
Для систематизированного изучения всего многообразия механизмов академик И. И. Артоболевский предложил классифицировать механизмы по структурно-конструктивным признакам, разделив их на семь основных групп: 1) рычажные; 2) фрикционные; 3) зубчатые; 4) кулачковые; 5) винтовые и клиновые; б) механизмы с гибкими звеньями; 7) прочие: пневматические, гидравлические и т. п.
В теории механизмов и машин все механизмы изображают посредством структурных и кинематических схем. Схема механизма, указывающая звенья и характер их взаимосвязи (вид кинематических пар), называется структурной.
Кинематическая схема — это структурная схема, звенья которой выполнены в масштабе.
Условное графическое изображение в структурных и кинематических схемах предусмотрено ГОСТ 2.770 — 68.
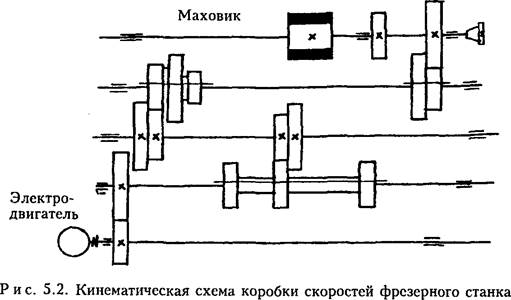
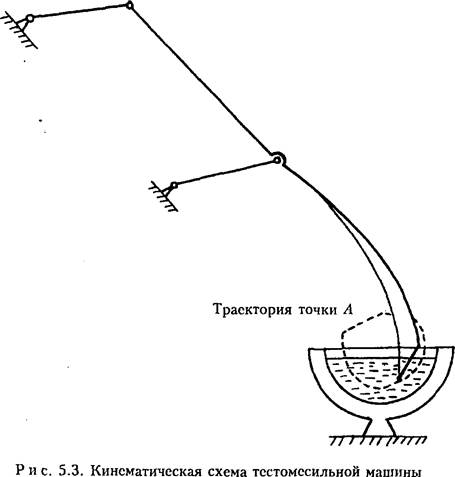
Примеры кинематических схем механизмов различного технологического оборудования (рис. 5.1 — 5.3) изображены в соответствии с ГОСТ 2.770-68.
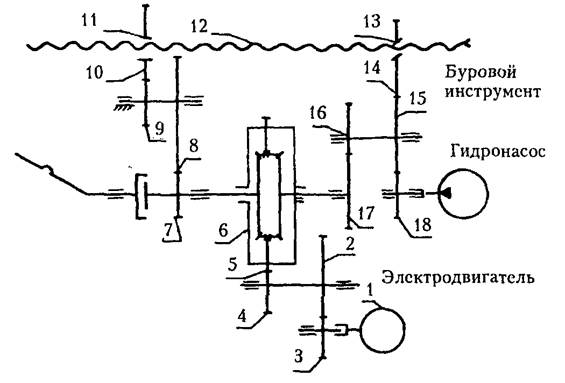
Рис. 5.1. Кинематическая схема автоматического сверла ЭБС10