 2015-07-03
2015-07-03 492
492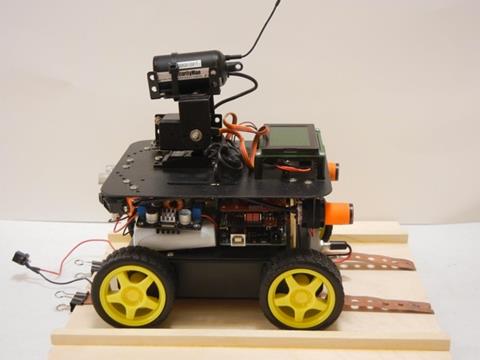
Подвижное устройство, передающее на компьютер телеметрию с датчиков и видеоизображение и управляющееся с компьютера либо работающее автономно по информации с датчиков. Подпитка от солнечных батарей, в т.ч. возможен вариант установки солнечных батарей не на робота, а на стационарную конструкцию, заряжающую свой аккумулятор (например, свинцово-кислотный 12 В) от солнечных батарей и при подъезжании робота и подключении заряжающую аккумуляторы робота.
Робот может использоваться как устройство телеприсутствия, для обучения программированию (в т.ч. с использованием среды LabView), для экспериментов с нейросетью и распознаванием образов
l контроллер Arduino Nano
l основание робота с моторами и колесами (возможен вариант на гусеницах)
l напечатанные на 3D принтере или изготовленные иным способом элементы корпуса
l драйвер двигателей на L298N
l ультразвуковой датчик расстояния HC-SR04
l цифровой датчик освещенности BH1750
l опционально: прочие датчики
l опционально: манипулятор
l Ni-MH аккумуляторы (6шт. АА) и их держатель
l солнечные батареи
l DC-DC преобразователь MC34063
l Bluetooth модуль для связи с компьютером или смартфоном
l Wi-Fi роутер
l вебкамера
l для коммутационной печатной платы: фольгированный текстолит, разъемы Female 2.54 и Male 2.54, клеммники








