2020-01-14
2020-01-14 341
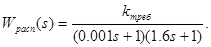
341Построение располагаемой ЛАЧХ. Под располагаемой ЛАЧХ понимается характеристика исходной системы управления, построенной исходя из требуемых режимов стабилизации. Обычно под исходной системой понимается система, состоящая из управляемого объекта и управляющего устройства и не снабженная необходимыми корректирующими средствами:
 (2.7)
(2.7)
Строим располагаемую ЛАЧХ. Для этого производим статический расчет САУ по задающему и возмущающему воздейставию.
Статический расчет САУ по задающему воздействию:
 (2.8)
(2.8)
 (2.9)
(2.9)
 (2.10)
(2.10)

По возмущающему воздействию
 (2.11)
(2.11)
 (2.12)
(2.12)
 (2.13)
(2.13)
Из предложенных  выбираем тот, который больше.
выбираем тот, который больше.
 (2.14)
(2.14)
 (2.15)
(2.15)
 (2.16)
(2.16)
 (2.17)
(2.17)
 (2.18)
(2.18)
Построение желаемой ЛАЧХ делается на основе тех требований, которые предъявляются к проектируемой системе управления, такие как перерегулирование, время переходного процесса, коэффициенты ошибок.
Определяем частоту фазы желаемой ЛАЧХ.
 . (2.19)
. (2.19)
Находим ЛАЧХ последовательного корректирующего устройства путем вычитания ЛАЧХ располагаемой системы и ЛАЧХ желаемой системы.
 (2.20)
(2.20)
 (2.21)
(2.21)
 (2.22)
(2.22)
МП реализует передаточные функции регулятора и корректирующего звена. Из условия подавления помех определим  .
.

Передаточная функция регулятора ПИД – типа имеет вид:
 ; (2.23)
; (2.23)
 ; (2.24)
; (2.24)
 (2.25)
(2.25)

 ; (2.26)
; (2.26)
Т.к при построении ЛАЧХ мы учитывали интегрирующее звено, поэтому при расчете  мы эту составляющую не учитываем.
мы эту составляющую не учитываем.
На рис. 2.8 изображено построение ЛАЧХ.
Выбор периода квантования Т является важным этапом проектирования ЦСАУ. Уменьшение Т облегчает условия устойчивости, приводит к повышению точности регулирования, загрузки ЦВУ и неэкономному расходу машинного времени.
Увеличение Т ухудшает качество регулирования ЦСАУ. Поэтому возникает проблема компромиссного решения, удовлетворяющего противоречивым требованиям.

Практика проектирования ЦСАУ позволяет сделать практический вывод: для обеспечения устойчивости ЦСАУ необходимо, чтобы частота 2/Т была, по крайней мере, на 0,5 декады правее частоты среза желаемой ЛАЧХ непрерывной части:

 0,08с. (2.28)
0,08с. (2.28)
Таким образом, данный метод определения Т исходит из обеспечения устойчивости ЦСАУ.
Передаточная функция цифрового регулятора имеет вид:
 (2.29)
(2.29)
 (2.30)
(2.30)
 (2.31)
(2.31)
 =
=  ;
;  =
=  ;
;  =
=  . (2.32)
. (2.32)