 2014-02-05
2014-02-05 4224
4224Лекция 6
I) По методу управления САР и САУ делятся на:
а) системы, неприспосабливающиеся к изменяющимся режимам работы объекта регулирования;
б) приспосабливающиеся системы, т.е. адаптивные.
Неприспосабливающиеся системы - это наиболее простые системы, которые не изменяют своей структуры и параметров в процессе управления. Для этих систем на основе информации существующей до начала их работы (т.е. априорной) выбирают структуру и рассчитывают параметры, обеспечивающие заданные свойства системе для типовых и наиболее вероятных условий ее работы. Этот класс систем включает в себя три типа:
1). Стабилизирующие системы – обеспечивают поддержание регулируемой величины на постоянном заданном значении. Например: система автоматического регулирования, поддерживающая заданное значение расхода воздуха на дутье доменной печи.
2). Программные системы – обеспечивают изменение регулируемой величины во времени по заранее заданной программе. Например: система автоматического регулирования, обеспечивающая изменение расхода воздуха по ходу продувки в конвертере.
|
|
|
3). Следящие системы – обеспечивающие изменение регулируемой величины в заданном соотношении с управляющим воздействием, которое изменяется произвольным образом, не зависящим от данной системы. Например: система автоматического регулирования соотношения топливо – воздух при управлении сжиганием топлива в мартеновской печи.
Большинство систем, действующих в настоящее время, относится к неприспосабливающимся системам. Их структура и настройка определяется при проектировании и наладке и в дальнейшем автоматически не изменяется. При необходимости перенастройка системы может осуществляться вручную.
Приспосабливающиеся системы – это такие системы, в которых параметры управляющих устройств или алгоритмы управления автоматически и целенаправленно изменяются для осуществления управления объектом, причем характеристики объекта или внешнее воздействие на него могут изменяться непредвиденным образом. Адаптивная система способна изменить свою структуру, параметры или программу действий в процессе управления. Особенный случай адаптивной системы это – экстремальные системы, которые автоматически ищут экстремум регулируемой величины, а так как его положение изменяется в процессе работы объекта, система автоматически изменяет направление поиска, скорость поиска и т. д. Примером экстремальной системы является САР температуры в печи, отапливаемой газом.
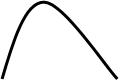
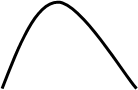
Требуется обеспечить максимальную температуру в печи, т.е. экстремум регулируемой величины при любых расходах топлива и изменении других параметров работы печи (рис. 6.1). Значение температуры печи – выходной величины объекта управления при данном топливе будут зависеть от расхода воздуха – входной величины объекта.
|
|
|


 1
1



 2
2
 |


Рис 6.1.Статическая характеристика экстремальной САР.
Если воздуха мало, то топливо сгорает не полностью и температура в печи меньше заданной. Если воздуха в печи много, то топливо сгорает полностью, но требуется тепло на нагрев избыточного воздуха, ненужного на сжигание топлива, и температура в печи также меньше необходимой. Если расход воздуха близок к теоретически необходимому для сжигания топлива (), достигается максимальная температура в печи . Кривые 1 и 2 относятся к разным режимам работы печи.
Адаптивные системы реализуются с использованием ЭВМ и, следовательно, по существу их следует отнести к АСУТП работающим в супервизорном режиме или режиме непосредственного цифрового управления. Исключение составляют некоторые экстремальные системы.
Для работы ЭВМ необходимо наличие аналитического описания объекта, т.е. его математической модели и алгоритмов адаптации и управления.
II) По характеру использования информации САР и САУ делятся на:
а) замкнутые системы;
б) разомкнутые системы;
в) комбинированные системы.
Замкнутые системы для своей работы используют текущую рабочую информацию о выходных величинах, определяют отклонение регулируемой величины от заданного значения и принимают меры для устранения этого отклонения.
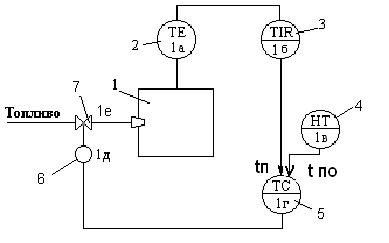
Рис 6.2.Схема функциональной структуры замкнутой САР температуры в печи.
На рис. 6.2 представлена структура САР температуры tn в печи 1. Чувствительным элементам – датчиком температуры служит термопара 2 (поз. обозн. 1а) Информация о значении температуры в печи поступает на показывающий и регистрирующий прибор 3 (поз. обозн. 1б), а с него в регулятор 5 (поз. обозн. 1г). В регулятор с задатчика 4 (поз. обозн. 1в) поступает сигнал о заданном значении температуры tno, в состав которого входит сравнивающий элемент. Сравнивающий элемент вырабатывает отклонение ε = tпо - tп, и в соответствии с алгоритмом управления, регулятор формирует управляющее воздействие. Это воздействие в виде управляющего сигнала передаётся на исполнительный механизм 6 (поз. обозн. 1д), обеспечивающий перемещение регулирующего органа 7 (поз. обозн. 1е). В качестве регулирующего органа используется поворотная заслонка в трубопроводе. Если температура в печи меньше заданной, то расход топлива увеличивается, а если больше - то уменьшается.
В рассмотренном примере имеется замкнутый контур регулирования, в котором информация о результатах работы объекта, т.е. о значениях регулируемой выходной величины поступает на его вход в преобразованном виде. Такая подача сигнала называется обратной связью. А элементом обратной связи является регулятор, обеспечивающий отрицательную обратную связь т.к. его действие направлено на уменьшение и устранение отклонения регулируемой величины от заданного значения.
Замкнутые системы работают при возмущениях действующих по любым каналам, т.к. регуляторы в таких системах вступают в действие при наличии ошибки регулирования ε независимо от того, чем вызвано появление этого отклонения. Замкнутые системы не могут обеспечить соответствие заданного и реального значений регулируемой величины во всем диапазоне управления (Х=Хо). Это равенство может установиться лишь в конце переходного процесса в положении равновесия.
Разомкнутые системы не используют рабочую информацию о регулируемых величинах т.к. отсутствует обратная связь. Работа таких систем основана на информации о входных величинах.
Разомкнутые системы делятся на:
|
|
|
1) системы с жесткой программой.
2) системы с регулированием или управлением по возмущению.
Примером системы с жесткой программой служит система автоматического пуска и останова комплекса механизмов, в котором должна выдерживаться определенная последовательность работы отдельных механизмов (рис.6.3).

|
|



Рис. 6.3. Структурная схема разомкнутой САР с жёсткой программой.
На вход регулятора поступает определенная программа действий Х0(t). Регулятор, являющийся устройством, реализующим заданную программу, вырабатывает регулирующее воздействие Y(t) обеспечивающее необходимое изменение Х(t). В металлургии примерами разомкнутых систем являются: система автоматического управления загрузкой доменной печи, система автоматической перекидки клапанов мартеновской печи.
Разомкнутые системы с регулированием по возмущению используют информацию о входных величинах – возмущениях и принимают меры, чтобы указанные возмущения не оказывали влияние на выходную величину, т.е. как бы компенсируют их. Поэтому их называются инвариантными или системами с компенсацией возмущений. Рассмотрим структуру разомкнутой системы автоматического регулирования температуры в печи (рис 6.4), по своим задачам аналогичную замкнутой САР, рассмотренной выше (рис 6.2).
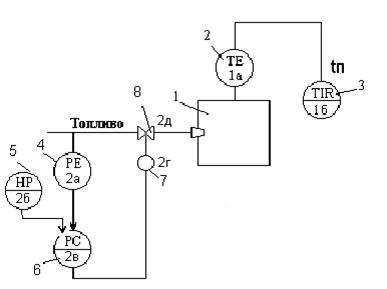
Рис 6.4. Схема функциональной структуры разомкнутой САР температуры в печи с регулированием по возмущению.
Регулируемой величиной является температура tn в печи 1. Основным возмущением является изменение давления газа в газопроводе, которое вызывает изменение расхода топлива и изменение температуры в печи, т.е. изменение регулируемой величины. Для компенсации влияния возмущения на значение выходной величины применяют регулятор 6 (поз. обозн. 2в), называемый компенсатором возмущений. Регулятор получает информацию о значении давления газа от датчика давления 4 (поз. обозн. 2а) и заданном значении давления от ручного задатчика 5 (поз. обозн. 2б). Затем по заранее заданной программе с помощью исполнительного механизма 7 (поз. обозн. 2г) регулятор изменяет положение регулирующего органа 8 (поз. обозн. 2д). Давление перед горелкой при правильно выбранной структуре и законе действия компенсатора не будет зависеть от давления в газопроводе и, следовательно, не будет сказываться на расходе топлива и значении температуры в печи. В этом заключается принцип компенсации возмущений.
|
|
|
В рассмотренном примере регулируемая величина – температура в печи измеряется термопарой 2 (поз. обозн. 1а) и регистрируется прибором 3 (поз. обозн. 1а). Но эта текущая информация не используется системой регулирования, т.е. отсутствует обратная связь по результатам работы системы. Контур компенсации возмущения разомкнут, т.е. выходная величина контура не оказывает влияния на входную величину – изменение давления в газопроводе.
Приведенный пример, показывает, что возможна компенсация определенного контролируемого возмущения. Если таких возмущений несколько, то для компенсации каждого из них необходим свой контур.
Но в системе всегда имеются возмущения, в том числе случайные и не контролируемые, которые могут вызвать отклонение регулируемой величины от заданного значения, поэтому на практике часто используют комбинированные системы автоматического регулирования. Они сочетают в себе оба принципа регулирования: по отклонению и по возмущению. В системе используется один регулятор для регулирования по отклонению, а для компенсации возмущений используется разомкнутые контуры с устройствами ввода возмущения (УВВ), которые изменяют задание регулятору в зависимости от величины возмущений Z (рис 6.5).
 | |||
| |||


 Z Z
Z Z










|
|
X
 |
Рис. 6.5. Структурная схема комбинированной САР:

III) По результатам работы в установившемся состоянии системы делятся на:
а) астатические системы;
б) статические системы.
В астатических системах регулируемая величина после окончания переходного процесса точно равна заданному значению. Практически она может отличаться на некоторую малую величину, обусловленную нечувствительностью системы (рис.6.6).

 X 1
X 1
 |
 X01
X01


 X0
X0
 τ
τ
Рис. 6.6. Графики переходных процессов в астатической системе.
График 1 (рис. 6.6) характеризует переходный процесс в системе при изменении заданного значения регулируемой величины с Х0 до Х01. График 2 – при прочих возмущениях и сохранении заданного значения Х0
В статической системе после окончания переходного процесса возникает разность между заданным и установившимся значениями регулируемой величины (рис. 6.7). Эта разность называется статической ошибкой. Она зависит от величины возмущения, в том числе задания и от параметров настройки регуляторов, но принципиально неизбежна в статических системах.








