2014-02-02
2014-02-02 1666
1666Тема: Механізми пересування ВПМ
МЕХАНІЗМИ ЗМІНИ ВИЛЬОТУ
Способи і механізми зміни вильоту
У поворотних і стріловидних кранах механізми зміни вильоту призначені для переміщення вантажу в радіальному напрямі. Виліт можна змінювати двома способами: радіальним — переміщення візка або електроталі стрілою; гойданням стріли у вертикальній площині (зміною кута нахилу).
Стріловий візок може бути звичайній конструкції (з механізмами підйому і пересування) і полегшеної (з канатною тягою і виносними механізмами), що має значно меншою металоємністю. Тому така конструкція візка, як і електроталь, є основним механізмом радіальної зміни вильоту.
Механізми зміни вильоту гойданням стріли можуть мати гнучкий або жорсткий зв'язок приводу із стрілою.
Механізми зміни вильоту гойданням стріли бувають наступних типів (мал. 77):
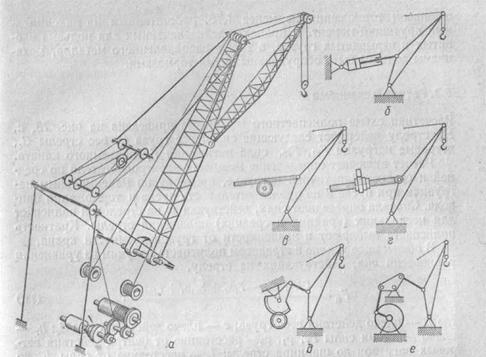
поліспастні (а), гідравлічні (б), рейкові (в), гвинтові (г), секторні і секторно-кривошипні (д), кривошипні коромисла (е).
поліспастні (а), Найширше застосовують поліспастні механізми унаслідок простоти пристрою і експлуатації, невеликої маси.
Поліспастні механізми зміни вильоту аналогічні механізмам підйому і складаються з двигуна, редуктора, гальма і барабана. Натягнення каната підйому стріли змінно і залежить від кута нахилу. Для забезпечення постійності обертального моменту двигуна, застосовують конічні або складнішої конструкції барабани. Механізм зміни вильоту повинен бути забезпечений гальмом із запасом гальмування не менше 1,75, розрахованим на максимальний обертальний момент. У кранах, призначених для підйому отруйних і вибухових вантажів, а також розплавленого металу, механізми повинні бути обладнані двома гальмами.
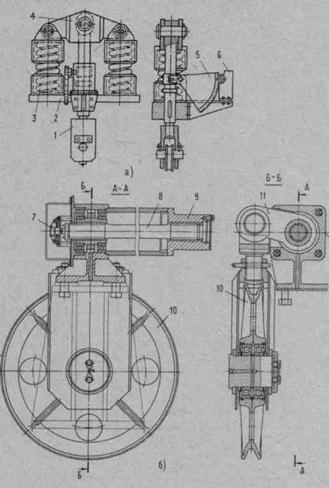
гідравлічні (б), Все більше поширення набуває гідравлічний механізм в наслідок невеликих габаритів, плавності ходу, МОЖЛИВОСТІ регулювання швидкості (застосовується найчастіше в самохідних мобільних кранах). Гідравлічний механізм (мал. 104. > має гідроциліндр, що коливається, 5, I шток 6 поршня якого сполучений стрілою. Цей механізм обеспечивае плавну роботу.
Інші механізми застосовують у кранах, де необхідний жорсткий зв'язок зі стрілою, що виключає мимовільний рух стріли під дією сил інерції і вітрОВиХ навантажень.
рейкові (в), Найбільш простими є рейковий і гвинтовий механізми, що мають порівняно невелику металоємність. З цих механізмів найбільш поширений рейковий механізм (мал. 104, а). як один з найбільш легких і простих у виготовленні. Він має зубчату або цевочную рейку 1, переміщувану приводною шестернею 2 в тих, що направляють, що коливаються. Рейка шарнірно сполучена із стрілою.
гвинтові (г), Гвинтовий механізм (мал. 104,6) складається з приводної гайки 3 і гвинта 4. шарнірно сполученого із стрілою. Гайка разом з приводним механізмом | і двигуном розташована на шарнірних опорах, що дає можливість їй разом з гвинтом повертатися щодо горизонтальної осі при підйомі стріли. Маса гвинтового механізму приблизно така ж, як і рейкового, проте він складніше у виготовленні, має вищу вартість і вимагає ретельного догляду і наблюдем за станом різьблення гвинта і гайки при | експлуатації. Проте гвинтовий механізм має НИЗЬКИй к. к. Д.
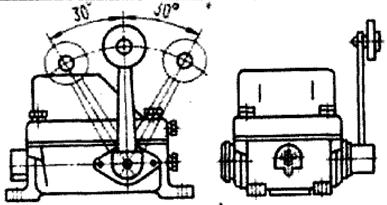
секторні і Секторний механізм (мал. 104.; має зубчатий сектор 7, зв'язаний | з провідною шестернею 8. Цей механи забезпечує рівномірну кутову швидкість гойдання стріли і при необхо- I димости низьке її опускання. Проте він володіє великою масою і г] моздкостью
секторно-кривошипні (д),. Секторно-крівошипниш i механізм (мал. 104, д) декілька про по конструктивному исполнени і володіє меншою масою, ніж а уторований.
кривошипні коромисла (е). КриВОШипНОМу Механізму Властива підвищена безпека у роботі унаслідок замикання стріли в мертвих положеннях кривошипа, що виключає застосування кінцевих защистних пристоїв, які оберігають від можливого падіння або закидання стріли при переході за крайнє положення. Їх застосовують в портальних кранах.
Кривошипно-шатунный механи
(мал. 104, е) складається з кривошипа 9 I і шатуна 10, сполученого з ромыслом 11, яке зв'язане тягою із стрілою. Цей механізм наде>> і безпечний в роботі, особливо, її крайні положення стріли соотве ствуют мертвим точкам кривошипш механізму. В цьому випадку кривошипшатунный механізм не вимагає кон-цевых захисних пристроїв і виключає можливість падіння або перекидання стріли на кран під час переходу її за крайні положення.
Механізми зміни вильоту, що забезпечують горизонтальне переміщення вантажу
Зміна кута нахилу стріли в розглянутих механізмах пов'язана з одночасним підйомом або опусканням вантажу, а отже, з великими коливаннями навантажень. Тому деякі механізми зміни вильоту сконструйовані так, що при зміні кута нахилу стріли вантаж залишається на колишньому рівні, і, крім того, для розвантаження приводу момент від ваги стріли врівноважується моментом від противаги: при опусканні стріли плече її центру тяжіння віддаляється від осі гойдання і одночасно збільшується плече противаги.
Потужність двигуна механізму зміни вильоту стріли при цьому менше, ніж в звичайних механізмах унаслідок постійності рівня вантажу і витрачається в основному тільки на подолання сил тертя в шарнірах, опори від жорсткості канатів на блоках, від вітрових навантажень і сил інерції.
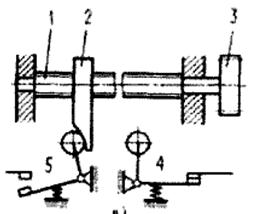
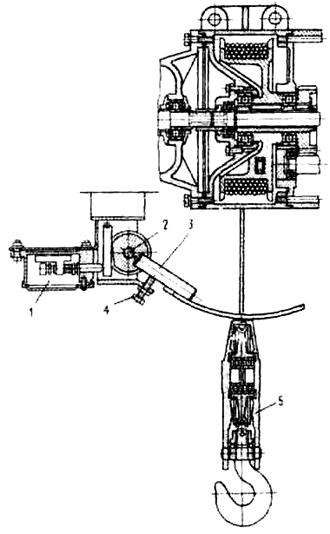
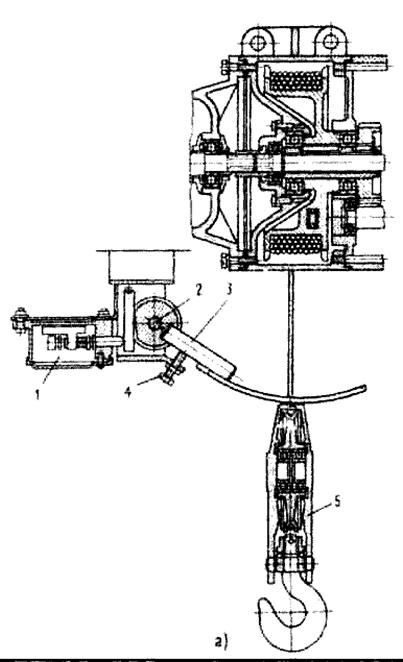
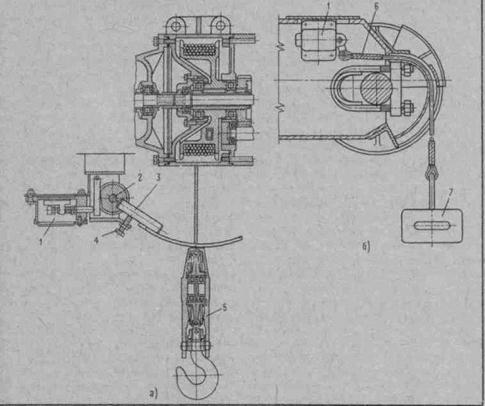
Розглянемо один з таких механізмів, вживаних в портальних кранах (мал. 79, а, би). Механізм кривошипне коромисло повідомляє коливання стрілі / від кривошипа 6 через шатун 7 і коромисло 8. Стріла здійснює повний розмах за півоберт кривошипа. Система урівноважена противагою 9.
На кінці стріли / шарнірно приєднаний хобот 2, в крапці 3 якого закріплена гнучка відтяжка, а кінець її закріплений в крапці 5
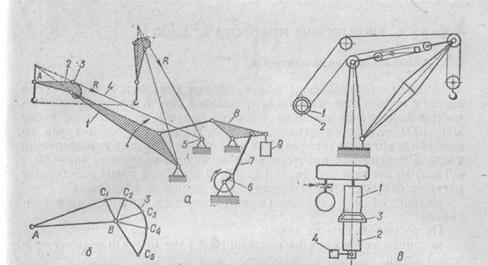
Унаслідок того що гнучка відтяжка 4 огинає криволінійну частину хобота 2 по кривій лемніскаті (мал. 79, би), при зміні вильоту вантаж переміщатиметься по горизонталі. Дійсно, кінематична схема механізму — стріла, відтяжка і хобот — є шарнірними четырехзвенником із змінними сторонами (прямильный механізм Чебишева).
Стріла в будь-якому положенні знаходиться в рівновазі, оскільки рівнодіюча сил R проходить через ВІСЬ обертанні 5. Окрім описаного, є і дру] не механізми зміни вильоті з жорсткою відтяжкою, поли< м, і гные п пр
Hi pin 7<), п показана одна мл полпспастиых схем механізму зміні ныжч він вирядженими лебідками, в якій горизонтаЛЬНОе П< pi 4ещ< НИС Г| гается шляхом зв'язку між стрело- і
вантажопідйомними. ih Горизонтальне переміщення вантажу при
підйомі стріли механізмі досягається тим, що при наматыва-
ш!и стріловидного каната на барабан (у звичайних крапах це приводить
до одночасного підйому вантажу) вантажний канат змотується з барабана вантажною лебідкою. При опусканні стріли все відбувається у зворотному напрямі.
Барабан стрелоподъемной лебідки 2 приводиться в рух від барабана / вантажної лебідки за допомогою фрикційної муфти 3, що включається електромагнітом 4 одночасно з пуском двигуна вантажної лебідки. Підбором діаметрів барабанів і напрямом навивки канатів можна добитися майже горизонтального переміщення вантажу при зміні вильоту стріли.
Хід виконання роботи
1.
2.
3.
4.
5.
Питання для самоконтролю
Лабораторна робота №9
Тема: Пристрої безпеки ВПМ
ПРИСТРОЇ БЕЗПЕКИ призначені для забезпечення безаварійної експлуатації вантажопідйомних машин, забезпечують своєчасну зупинку механізмів і не допускають появи навантажень, небезпечних для елементів механізмів та стійкість кранів проти опрокидування.
Класифікація ПРИСТРОЇВ БЕЗПЕКИ
За принципом дії:
Ÿ Запобіжні (при спрацювання вини зупиняють механізм)
Ÿ Сигналізаційні (при спрацюванні подають світловий або звуковий сигнал, що попереджає про досягнення небезпечного положення або появу небезпечного навантаження)
За призначенням:
Ÿ Кінцеві вимикачі (призначені для обмеження шляху руху вантажу, візка, крана)
Ÿ Обмежувачі вантажопідйомності та вантажного моменту (вони запобігають перевантаженню крана)
Ÿ Протиугоні пристрої (призначені для запобігання угону вітром крана у непрацюючому стані)
Ÿ Упори, буферні пристрої, обмежувачі перекосу (прилади які обмежують граничні положення візка або крана)
ПРИСТРОЇ БЕЗПЕКИ МЕХАНІЗМУ ПІДЙОМУ І ЗМІНИ ВИЛЬОТУ СТРІЛИ
Для забезпечення безпечної роботи механізмів піднімання і зміни вильоту стріли вантажопідйомні машини обладнують приборами безпеки, що діють автоматично. Вони вимикають механізми при підході вантажу і спробі піднімання вантажу, вага якого перевищує вантажопідйомність крана.
КІНЦЕВІ ВИМИКАЧІ Увага Механізми піднімання з електричним приводом повині бути обладнанні кінцевими вимикачами.
КІНЦЕВИЙ ВИМИКАЧ пристрій безпеки, що автоматично вимикає струм при підході механізму піднімання до крайнього верхнього (а іноді і нижнього) положення
УвагаКінцевий вимикач механізму підйому повинен бути встановлений таким чином, щоб після зупинки вантажозахоплювального пристрою при підніманні, зазор між вантажозахоплювальним пристроєм та упором складав не менше ніж 50 мм для електродвигунів і не менш ніж 200 мм для інших вантажопідйомних машин
Важільний кінцевий вимикач Застосовуються при односторонньому обмеженні руху вантажу.
Кнопочний кінцевий вимикач
Принцип дії. При досягненні вантажозахоплювальним пристроєм граничного положення відбувається розрив ланцюга керування, що призводить до вимкнення електродвигуна механізму і до одночасного замикання гальма, що забезпечує своєчасну зупинку вантажу. Електрична схема передбачає можливість пуску механізму у зворотному напрямі.
Шпиндельний кінцевий вимикач. Застосовується при необхідності обмеження руху механізму в обох напрямках.
1 - гвинт
2 - гайка
3 – зубчаста або ланцюгова передача
4, 5 - контакти
Принцип дії. Гвинт 1 отримує обертання від одного з валів механізму через зубчасту або ланцюгову передачу 3. Нарізкою шпінделя пересувається гайка 2, що вимикає повідцем контакти 4 і 5 у кінцевих положеннях, що відповідають граничному верхньому і нижньому положенням вантажозоплювального пристрою.
Передавальне число передачі 3 повинно бути таким, щоб за час переміщення вантажозахоплювального пристрою від крайнього нижнього положення до крайнього верхнього положення гайка 2 перемістилась шпінделем гвинта 1 з одного крайнього положення в інше.
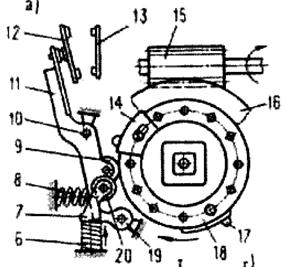
Кінцевий вимикач типу ВУ Застосовується при необхідності обмеження руху механізму в обох напрямках, при чому є більш компактним тому що довгий шпіндель замінений чер’вячной передачею.
6 – пружина
7 – клямка
8 – пружина
9 – ролик
10 – вісь
11 – важіль
12 – контакти рухомі
13 - контакти ланцюгів управління
14 – вмикаючий кулачок
15 – чер’вяк
16 – черв’ячне колесо
17 – вимикаючий кулачок
18 – кулачкова шайба
19 – вісь
20 – клямка
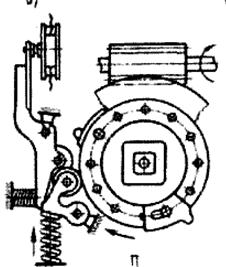
Принцип дії. Кулачкова шайба 18 закріплена на осі черв'ячного колеса 17 сполученого з черв'яком 15, що пов’язаний з одним з валів механізму підйому.
На шайбі встановлені вмикаючі 14 і вимикаючі 17 кулачки, що викликають вмикання або вимикання контактів 13 ланцюгів управління.
Відповідним підбором передавального числа передачі (черв'ячна передача має передавальне число 50) і установкою кулачків на шайбі можна забезпечити виключення контактів 13 при досягненні вантажозахоплювальним пристроєм крайніх положень.
При двосторонньому вимиканні на шайбі 18 повинні бути встановлені два комплекти кулачків. Кінцевий вимикач в механізмі підйому повинен бути встановлений, таким чином, щоб вал кінцевого вимикача був сполучений зубчастою передачею з валом барабана.
Контакти 13 замикаються рухомими контактами 12, закріпленими на важелі 11, що повертається на осі 10. До дії включаючого кулачка 14 під дією пружини 8 на важіль 11, контакти 13 знаходяться у розімкненому стані. При обертанні шайби на ролик 9 діє кулачок 14, важіль 11 повертається, пружина 8 стискається, і контакти замикаються. При включеному стані контакти 13 утримуються клямкою 7, що обертається відносно осі 19 під впливом зусилля стиснутої пружини 6. При натисненні кулачком 17 на ролик клямки 20 важіль 11 звільняється від клямки, що приводить до розмикання контактів 13.
Обмежувач висоти підйому вантажу
Обмежувач висоти підйому вантажу, встановлюється на електроталях і кранах.
1 – контакти кінцевого вимикача
2 – вісь
3 – важель
4 – болт
5 – гакова підвіска
Принцип дії Контакти кінцевого вимикача 1 утримуються у замкненому положенні при нормальній роботі механізму вагою важеля 3, встановленого на осі 2.
У крайньому верхньому положенні гакова підвіска 5 повертає важіль 3, що приводить до вимкненя контактів кінцевого вимикача. Положення важеля 3 регулюється болтом 4.
2. Пристрої безпеки
Пристрої безпеки призначені для забезпечення безаварійної експлуатації вантажопідйомних машин. Вони забезпечують своєчасну зупинку механізмів і не допускають появу навантажень, небезпечних для елементів механізмів і стійкості кранів проти перекидання. За принципом дії їх розділяють на запобіжних, таких, що проводять при спрацьовуванні зупинку механізму, і сигналізації, подають світловий або звуковий сигнал, застережливий про досягнення небезпечного положення або появу небезпечного навантаження. За призначенням пристрою безпеки класифікують на наступні групи: кінцеві вимикачі, призначені для обмеження шляху руху вантажу, візка, крана; обмежувачі вантажопідйомності і вантажного моменту, що оберігають кран від перевантаження; противоугонные пристрої, призначені для попередження угону вітром крана в неробочому стані, і упори, буферні пристрої, обмежувачі перекосу і т. п., що обмежують граничні положення візка або крана.
Пристрої безпеки механізмів підйому і зміни вильоту.
Мал. 136
Кінцеві вимикачі:
0-«рычажный; «— кнопковий; у — шпіндель;
г — гипа ВУ
При односторонньому обмеженні ходу вантажу зазвичай застосовують кінцеві вимикачі важелів або кнопкових (мал. 136, а, би). При досягненні вантажозахватним пристроєм крайнього положення відбувається розрив ланцюга управління, що приводить до відключення електродвигуна механізму і до одночасного замикання гальма, що забезпечує своєчасну зупинку вантажу. Електрична схема предусматри вает можливість пуску механізм, у зворотному напрямі.
При необхідності обмеження ходу механізму в обох напрямах движс ния застосовують вимикачі (мал. 136, в) шпінделів, гвинт / яких пол\-чает обертання від одного з ваті; механізму через зубчату або цепнук передачу 3. По нарізці шпінделя пері заважає гайка 2, що вимикає повідцем контакти 4 і 5 в кінцевих положеннях, соответствующи граничному верхньому і нижньому поло жениям вантажозахватного пристрою Передавальне число передачі 3 должн. бути підібрано так, щоб за брешемо переміщення вантажозахватного влаштуй ства від крайнього нижнього положення д< крайнього верхнього гайка 2 перемісти лась по шпінделю гвинта 1 з одне! i крайнього положення в інше.
Компактнішим є кінцеві вимикач типу ВУ (мал. 136, г), в до тором довгий шпіндель замінений чер вячной передачею. Кулачкова шайба I закріплена на осі черв'ячного колеса h сполученого з черв'яком 15, связанны з одним з валів механізму підйому. На шайбі встановлені куркульки 14 (що включає) і 77 (що відключає), зухвале замикання (положення //) або розмикання (положення /) контактів 13 ланцюгів управління. Відповідним підбором передавального числа передачі (черв'ячна передача має передавальне число 50) і установкою кулачків на шайбі можна забезпечити виключення контактів 13 при досягненні вантажозахватним пристроєм крайніх положень. При двосторонньому виключенні на шайбі 18 повинні бути встановлене два комплекти кулачків. Кінцевий вимикач в механізмі підйому повинен бути встановлений, як показано на мал. 98 (поз. 6), тобто вал кінцевого вимикача повинен бути сполучений зубча тією передачею з валом барабана. Контакти 13 замикаються рухомими контактами 12, закріпленими на важелі 11, що повертається на осі 10. До дії включаючого кулачка 14 під дією пружини 8 на важіль 11 контактів 13 знаходяться в розімкненому стані. При обертанні шайби по стрілці, вказаній на малюнку, на ролик 9 діє кулачок 14, важіль 11 повертається, пружина 8 стискається, і контакти замикаються. При включеному стані контакти 13 утримуються клямкою 7, що обертається відносно осі 19 під впливом зусилля стислої пружини 6. При натисненні кулачком 77 на ролик клямки 20 важіль // звільняється від клямки, що приводить до розмикання контактів 13.
Мал. 137
Установка обмежувача висоти підйому вантажу
Мал. 138
Покажчик вантажопідйомності, що допускається
Обмежувач висоти підйому вантажу, що встановлюється на електроталях і кранах (мал. 137, а), має контакти кінцевого вимикача 1, які утримуються в замкнутому положенні при нормальній роботі механізму вагою важеля 3, встановленого на осі 2. У крайньому верхньому положенні підвіска крюка 5 повертає важіль 3, що приводить до виключення контактів кінцевого вимикача. Положення важеля 3 регулюється болтом 4.
У інших конструкціях (мал. 137,6) при застосуванні кінцевого вимикача типу КУ контакти вимикача 1 утримуються в замкнутому стані вагою спеціального важка 7, підвішеного на тросі 6 до важеля вимикача. При досягненні вантажозахватним пристроєм крайнього верхнього положення вантаж підводиться, натягнення троса зменшується, і під дією пружини, наявної в кінцевому вимикачі, контакти розмикаються, що приводить до виключення струму в системі управління механізмом підйому. В умовах запиленого середовища, високої вологості, за наявності вібрацій кінцеві вимикачі контактного типу швидко виходять з ладу, тому в цих умовах застосовують безконтактні вимикачі електронного, магнітного, індукційного або ультра звукового типу, що забезпечують більш, високу надійність і долговечносп
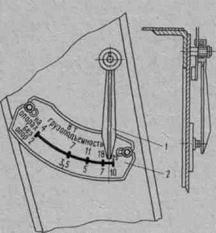
Крайнє верхнє положення стрель визначається за допомогою кінцевого вимикача таким нахилом, при якому стріла не може опрокинутьс-назад під дією вітрового навантаження, зусиль натягнення канатів механізмів підйому і сил інерції. Опре кидывание стріли може також відбутися при обриві вантажу, коли стріл, отримує імпульс, рівний потенциаль ний енергії її сил пружності під впливом ваги вантажу. Покажчик виліт стріли і вантажопідйомності (мал. 138) в о^ новном знаходить застосування в стр ловых кранах, що мають різну гр;> зоподъемность при різних вильотах.
Покажчик грузоподъемност
(мал. 138) складається з метал ическо1 сектора 2 з шкалою, укріпленого i стрілі, і шарнірно підвішеною стр. ки 1, вказуючою грузоподъемност що допускається при роботі на цьому вь літі стріли.
Обмежувач вантажопідйомності прс призначений для запобігання перегр\ ки крану, яка може приріст до обриву вантажних гнучких елемент (канатів або ланцюгів), поломці крюк і інших деталей механізму, образів, нию тріщин і залишкових деформац, металоконструкції і опрокидываш стріловидних пересувних кранів. Or r ничитель вантажопідйомності автома чесання вимикає двигун механізм підйому стріловидних і баштових кран при підйомі вантажу, маса якого пг. вышает номінальну грузоподъс ность більш ніж на 10%, а для порту ных кранів більш ніж на 15 Обмежувач вантажопідйомності кра мостового типу не винен допуску перевантаження більш ніж на 25%.
Обмежувач зазвичай складається з та чика зусилля і виконавського (обтяжливого) органу. По пристрою датл ков, що сприймають що діють кран зусилля, розрізняють пружин i гідравлічні і електричні огра чители. Найточніше срабатыва:-
торсіонні і електричні датчики, які можуть бути пов'язані з різними елементами крана.
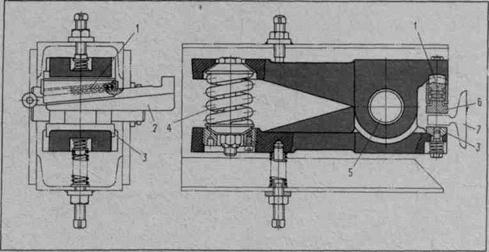
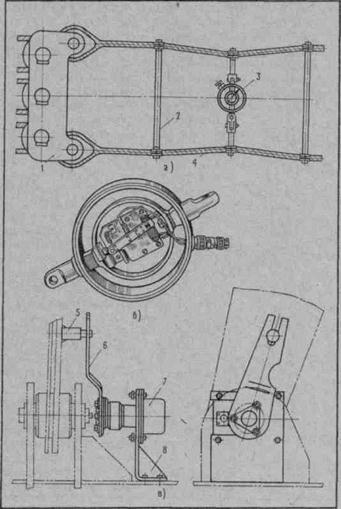
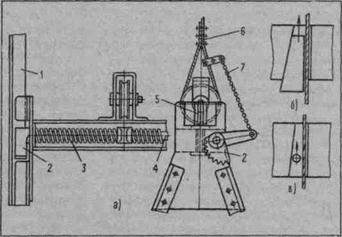
Пружинний обмежувач вантажопідйомності (мал. 139, а), вживаний в баштових і портальних кранах, має траверсу 4, що спирається на дві пружини стиснення 3, встановлені на нерухомій підставі 2. Кінець вантажного каната прикріплений до вилки 1 штока обмежувача, сполученого з траверсой. При перевантаженні крана більш ніж на 10% пружин 3, деформуючись, повертають зубчатий сектор 5, який сполучений з шестернею, встановленою на валику кінцевого вимикача 6. Це приводить до розмикання ланцюга управління електродвигуном підйому.
У торсіонному обмежувачі вантажопідйомності (мал. 139,(5) замість витих пружин використовують торсіонний валик 8, один кінець якого закріплений нерухомо на опорі 9, а другою має важіль 11с прикріпленим до нього зрівняльним блоком 10 вантажного поліспасту. При підйомі вантажу зусилля на блоці, пропорційне вазі вантажу, що піднімається, створює момент
Мал. 140
Обмежувач вантажного моменту:
а — розташування огранує теля на автомобільному крані; 6 — датчик зусилля; у — розташування датчика кута нахилу стріли
торсіонний валик, що закручує. Кут закручування валика пропорційний зусиллю, що діє на блоці 10. Торсіонний валик сполучений з електричним потенціометром 7, опір якого пропорційно вазі вантажу, що піднімається. При вазі вантажу, що перевищує що допускається, відбувається автоматичне виключення струму ланцюга управління. На кранах з гідроприводом функцію обмежувача вантажопідйомності може виконувати запобіжний клапан. У кранах з телескопічною стрілою обмежувач вантажопідйомності повинен мати датчики зусилля, нахилу і довжини стріли. Сигнали від всіх трьох датчиків підсумовуються і визначають можливість роботи крана.
Обмежувачі вантажного моменті, призначені для стріловидних кранор вантажопідйомність яких залежить о\ вильоту стріли. Обмежувачі вантажною моменту враховують не тільки мас> вантажу, що піднімається, але і виліт. Перспективним є обмежувач вантажного моменту електричного типу, що складається з трьох елементів: датчика зусилля, датчика кута нахилу стріли і релейного блоку. Датчик зусилля
3 (мал. 140) встановлюють між розпірками 2 і розтяжками 4, що сполучають стрілу з рухомою обоймою / поліспасту. Він є кільцевим динамометром з потенциоме-трическим перетворювачем, що видає електричний сигнал, пропорційний вимірюваному зусиллю. Силоїз-мерітельним елементом датчика є пружне кільце, що розтягується під дією зусиль в розтяжках, пропорційних вазі вантажу, що піднімається. Деформація кільця через спіральну пружину передається на передавальний механізм, що перетворює лінійне переміщення тяги динамометричного кільця в кутове. Датчик кута нахилу 7 встановлений на кронштейні 8 співісних з віссю повороту стріл і зв'язаний повідцем 6 з пальцем 5, закріпленим на стрілі. При зміні нахилу стріли повертається вал датчика, пов'язаний з важелем потенциоме-трического перетворювача. У даному обмежувачі вантажного моменту використовується принцип порівняння електричних сигналів від датчиків зусилля і кута нахилу стріли. Прилад спрацьовує при різниці електричних сигналів, рівній нулю, що відповідає наявності максимально допустимого навантаження.
Ловці автоматично зупиняють кабіну ліфта (або противага) у разі ослаблення канатів або перевищення граничної швидкості опускання. Принцип дії ловців заснований на створенні сили тертя між тими, що направляють кабіни, встановленими в шахті, і елементами ловця, закріпленими на кабіні. Ловці можуть бути такими, що самозаклинивающимися (клинові, роликові, ексцентрикові), що забезпечують миттєву зупинку кабіни (застосовують для вантажних ліфтів при швидкості менше 1 м/с), і ковзаючої дії, що забезпечують плавну зупинку кабіни (застосовують для ліфтів всіх типів при швидкості руху більше 1 м/с).
Ексцентриковий ловець (мал. 141) має ексцентрики 2, розташовані по обох сторонах кабіни на загальній осі 4 і утримувані від повороту і зіткнення з тією, що направляє / гнучкою тягою 7, сполученою з підйомним канатом 6. При ослабленні каната ексцентрики 2 під дією зусилля пружини 3 повертаються і при контакті з тією, що направляє 1 затискають її між ексцентриком і протилежною стороною направляючого черевика 5, зупиняючи кабіну. Описаному принципу аналогічні дії роликових і клинових ловців, що також впливають на ту, що направляє при ослабленні або обриві підйомного каната. У цих ловцях кут клину щодо ригеля каркаса кабіни вибирають таким, щоб клин або ролик заклинювався при
Мал. 141
Схеми дії ловців, що самозаклинивающихся:
а — ексцентрикового; б — клинового; у — роликового