2014-02-18
2014-02-18 1679
1679Г) ПД - регуляторы, ПИД - регуляторы
В) Изодромные регуляторы (ПИ-регул-ры)
Б) Астатические регуляторы (интегральные)
А) Статические регуляторы
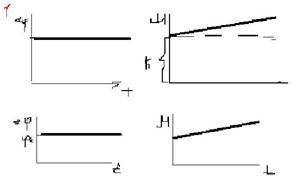
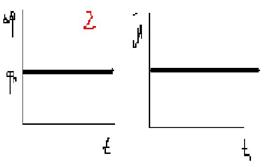
Статическое регулирование – при котором каждому положению регулирующего органа соответствует определенное значение регулируемой величины в статическом режиме, зависящее от величины нагрузки, действующей на объект регулирования. График статического режима изменения регулируемой величины нагрузки, действующей на объект (притока, стока)
Q – нагрузка (приток, сток)
φ1уст., φ2 уст. – статическая ошибка – отклонение регулируемой величины от φ0 в статическом, установленном режиме. В простейшем случае μ=f(∆φ). При этом данная зависимость μ=kp∆φ
kp – коэффициент усиления регулятора kp=const, поэтому регуляторы пропорциональные
Динамическая характеристика
 Из графика - и мгновенное изменяется при появлении ∆φ без запаздывания и воздействует на объект регулирования.
Из графика - и мгновенное изменяется при появлении ∆φ без запаздывания и воздействует на объект регулирования.
При этом сокращается время перехода процесса АСР, т.е. сокращается время регулирования данного параметра.
|
|
|
Достоинства регулятора: 1. хорошие динамические свойства. Недостатки: плохие статические свойства (наличие статической ошибки – статизм), регулирующая: φст.=1/ kp, ее можно понижать, увеличив kp).
Область применения: для регулирования объектов, допускающих статическую ошибку регулирования и подверженных небольшим и редким возмущениям.
 Астатическое регулирование – при котором объект регулирования, в установленном режиме поддерживается заданное значение регулируемой величины, независимо от нагрузки, действующей на объект регулирования. Статическая характеристика данного регулирования:
Астатическое регулирование – при котором объект регулирования, в установленном режиме поддерживается заданное значение регулируемой величины, независимо от нагрузки, действующей на объект регулирования. Статическая характеристика данного регулирования:
Закон регулироания: μ=(1/Tим)∫∆φdt
Tим – параметр настройки данных регулятором (время полного хода исполнительного механизма под действием регулятора при максимальной нагрузке, действующей на объект регулирования, принимаем ∆φ=константа) μ=∆φ*t/Tим.
Достоинства: отсутствие статической ошибки (поддерживает φ0 на заданном уровне). Недостаток: плохие динамические свойства (при появлении ∆φ, величина μ изменяется от 0 с постоянной скоростью медленнее, чем для П – регулятора – это увеличение времени переходного процесса в АСР – увеличение времени регулирования). Данный регулятор не применяется для регулирования астатических объектов, т.к. работа АСР в данном случае будет неустойчива.
Изодрома - равноубывающий (от греч.). Закон регулирования включает пропорциональные и интегральные составляющие μ = kp (∆φ+1/Tи∫∆φ)dt
Tи – время изодрома, время, за которое удваивается величина П - составляющей данного регулятора. Диаграмма работы.
|
|
|
 Принимаем ∆φ=констант., μ=kp(∆φ+∆φ*t/Tи), если t=Tи, то μ=2kp*∆φ
Принимаем ∆φ=констант., μ=kp(∆φ+∆φ*t/Tи), если t=Tи, то μ=2kp*∆φ
При появлении ∆φ на входе регулятора, мгновенно срабатывает П – составляющая.
Регулирующий орган перемещается на Кобс*μ. Это регулирование со статическим регулированием. Далее вступает в работу интегральная составляющая. Интегральное воздействие изменяется с постоянной скоростью и при этом устраняется статическая ошибка регулирования. Достоинства: хорошие статические и динамические свойства, устраняется статическая погрешность. Применяется для регулирования объектов, подверженных частым незначительным возмущениям.
Тд - время предворения +- бывают прямое и обратное
dφ∕dt - характеризует скорость изменения регулируемой величины.
Регулирующее воздействие данной заключается в предвидении на какую величину и в какую сторону изменится регулирующая величина Ф.
Диаграмма работы:
Если t=0 то μ→∞
t>0, 
Данный регулятор применяется для регулирования объектов чистого запаздывания, а также подверженым чистым возмущениям.
2) Пропорциональный регулятор с предворением (ПИД)
При t=0 срабатывает дифференциальная составляющая и μ ═ ∞
t>0, 
Динамические хорошие свойства применяются для регулирования объектов подачи, регулирование запаздывания.
1.Наличие статической ошибки свойственна ПИД регуляторам.
При синтезе АСР необходимо определить на сколько отклонится регулируемая величина от своего заданного значения, и как скоро завершится переходный процесс т.е. определить t.регулирования.
Для определения данных параметров служат параметры качества в АСР.
Графики переходных процессов в АСР приведены ниже
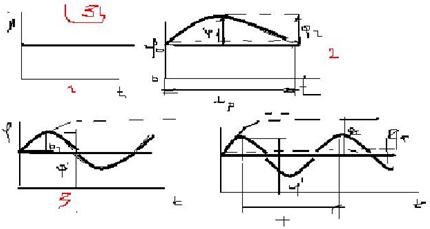
Рис.1 Изменение регулирующего воздействия на входе в объект
Рис.2 Изменение регулируемой величины в объекте. Пунктир при отключенном регуляторе. Сплошная – переходной процесс в регуляторе, Ф0 - заданное значение регулируемой величины, Ф1- максимальные динамические отклонения регулируемой величины, Фк - потенциальное отклонение регулируемой величины в объекте при оклоненном регуляторе, график экспоненциального переходного процесса.
Рис.3 График колебаний переходного процесса в АСР без остаточного отклонения регулируемой величины. Переходный процесс носит колебательно - затухательный характер Ф возвращается в значение Ф0.
Рис.4 Переходной процесс АСР с остаточным отклонением регулируемой величины.
При создании АСР важной задачей является выбор типа регулятора с учетом динамической характеристики объекта регулирования и требуемых параметров качества переходных процессов.
Существует несколько методов расчета и выбора типа регулятора:
1.Аналитический
2.Графоаналитический
3.Эксперимент
В практике используется второй метод:
Исходными данными для решения данной задачи являются следующие.
В зависимости от объекта регулирования (τ,Т,Коб), - , - заданные параметры качества переходного процесса в АСР (
, - заданные параметры качества переходного процесса в АСР ( ).
).
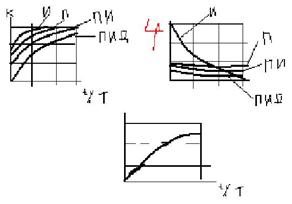
Методика заключается в следующем:
1.По отклонению t/T определяют вид регулирования.
Если t/T<0.2, то принимается релейный регулятор.
Если t/T>0.2, то принимают регулятор непрерывные действия.
2.Принимается заданный вид типового переходного процесса, т.е. в качестве типов применяют 2 вида.
2.1 апериодический (рис 2)
2.2 колебательный с 20% перерегулированием