 2015-01-30
2015-01-30 7133
7133Статика бірнеше аксиомаға негізделеді.
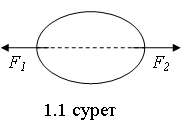
1. Екі күш жүйесінің тепе-теңдігі туралы аксиома. Денеге түсетін екі күш тепе-теңдікте болу үшін олардың шамалары тең болуы және түсу нүктелері арқылы өтетін түзу бойымен қарама-қарсы бағытталуы қажетті де, жеткілікті де: F1 = F2, бірақ  (1.1 сурет).
(1.1 сурет).
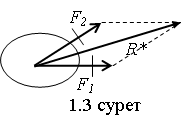
2. Теңгерілген КЖ-н қосу және алып тастау аксиомасы. Күштер жүйесінің қатты денеге әсерін өзгертпей, соған теңгерілген КЖ-н қосуға немесе алып тастауға болады. Салдары: АҚД-ге түсетін күштің әсерін өзгертпей, оны әсер ету сызығы бойымен дененің кез келген басқа нүктесіне көшіруге болады (1.2 сурет), яғни күш - жылжымалы вектор.
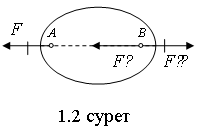
3. Күштер параллелограмы аксиомасы. Өзара бұрыш құрып, бір нүктеге түсетін екі күштің тең әсерлісі сол күштер қабырғалары болып табылатын параллелограмның диагоналі ретінде анықталады (1.3 сурет), яғни  .
.
4. Өзара әрекеттену аксиомасы. Екі дене бір-біріне шамалары тең және бір түзу бойымен қарама-қарсы бағытталған күштермен әсер етеді: F21 = F12,  .
.
5-аксиоманың алдында бірнеше ұғымды енгіземіз.
Егер дененің кеңістікте кез келген орын ауыстыру алуға мүмкіншілігі болса, ол еркін дене деп аталады. Егер кейбір орын ауыстырулар мүмкін емес болса, дене еркін емес деп аталады. Дене қозғалысының еркіндігін шектейтін шарттар байланыстар деп аталады. Байланыстар қатты немесе икемді материялық денелер арқылы орындалады. Дене түскен күштер әсерінен байланыс кедергілік жасап тұрған орын ауыстыруды орындауға тырысып, оған күш түсіреді. Біржолы байланыс та денеге модулі тап сондай, бірақ қарама-қарсы бағытталған байланыстың реакциясы деп аталатын күшті түсіреді. Реакциялардан басқа күштерді актив (пәрменді) күштер деп атаймыз. Байланыс реакциясының актив күштерден айырмашылығы – оның шамасы актив күштерге тәуелді және алдын ала белгісіз. Реакцияның бағыты - байланыс дененің қозғалысына кедергілік жасайтын бағытқа қарама-қарсы. Кейбір байланыстардың (тіректердің) реакциялары қалай бағытталатынын қарастырайық:
а) абсолют тегіс бет (үйкелісті ескермеуге болады) дененің бет үстінде жылжуына кедергілік жасамайды, ол тек қана бетке тік бағытпен қозғалуға кедергілік жасайды. Сондықтан оның реакциясы жанасып тұрған денелердің беттеріне ортақ нормаль бойымен бағытталады және жанасу нүктесіне түседі;
б) икемді жіп немесе шынжыр. Мұнда реакция жіп немесе шынжыр бойымен бағытталады;
в) цилиндрлік топса (подшипник) немесе жылжымайтын топсалы тұғыр. Тесіктерінен өтетін білікпен қосылған екі дене топсалы (шарнирлі) қосылысты құрайды. Біліктің өстік сызығы топсаның өсі деп аталады. Дене топса өсіне перпендикуляр бағытта орын ауыстыра алмайды, бірақ ол өске қатысты айнала алады. Сондықтан реакция топса өсіне перпендикуляр жазықтықта кез келген бағытталуы мүмкін. Әдетте оны екі құраушы күшке жіктейді;
г) каток түріндегі тірек, яғни жылжымалы топсалы тұғыр. Үйкеліс күші ескерілмесе, реакция домалау бетінің нормалі бойымен бағытталады;
д) сфералық топса және өкшелік. Мұндай байланыс дененің бір нүктесі ешқандай орын ауыстыру ала алмайтындай қылып бекітеді, ал сол нүктеге қатысты дене кеңістікте кез келген бағытта айналуы мүмкін. Реакция бекітілген нүкте арқылы өтеді; оның бағыты алдын ала белгісіз болғандықтан, оны үш құраушы күшке жіктейді;
е) екі шетінде топсалармен бекітілген, салмағы ескерілмейтін сырық. Сырыққа топсалардың центрлерінде түсетін тек екі күш ғана әсер етеді. Сырық тепе-теңдікте болғандықтан, сол күштер (реакциялар) топсалардың центрлерінен өтетін түзу бойымен бағытталу керек.
Еркін емес дене үшін келесі аксиома орын алады.
5. Байланыстар аксиомасы. Еркін емес денені, байланыстарды алып тастап және олардың әсерін реакциялармен ауыстырып, еркін дене ретінде қарастыруға болады.
6. Қатаю аксиомасы. Деформацияланатын дененің КЖ-нің әсерінен болған тепе-теңдік қалпы, оған қосымша байланыстарды орнатса, тіпті денені қатайған (абсолют қатты) дене ретінде қарастырса да, өзгермейді.
Үш күш туралы теорема: егер дене бір жазықтықта орналасқан үш параллель емес күш әсерінен тепе-теңдік қалпында болса, онда сол күштердің әсер ету сызықтары бір нүктеде қиылысады.
Дәлелдеу: Дене үш  күштері әсерінен тепе-теңдікте дейік. Олар параллель емес және бір жазықтықта болғандықтан, екі
күштері әсерінен тепе-теңдікте дейік. Олар параллель емес және бір жазықтықта болғандықтан, екі  күштерінің әсер ету сызықтары қиылысады, сонда күштерді сол нүктеге көшіріп, тең әсерлі
күштерінің әсер ету сызықтары қиылысады, сонда күштерді сол нүктеге көшіріп, тең әсерлі  күшіне ауыстыруға болады. Енді күші
күшіне ауыстыруға болады. Енді күші  күшін теңгереді, сондықтан олардың әсер ету сызықтары түйіседі, яғни барлық үш күштердің әсер ету сызықтары бір нүктеде қиылысады.
күшін теңгереді, сондықтан олардың әсер ету сызықтары түйіседі, яғни барлық үш күштердің әсер ету сызықтары бір нүктеде қиылысады.
1.3 Тоғысатын күштер жүйесі
Күштер жүйелері (КЖ) келесі түрлерге бөлінеді: тоғысатын КЖ, параллель күштер жүйесі, кез келген КЖ. Тоғысатын деп күштердің әсер ету сызықтары (ӘС) бір нүктеде қиылысатын КЖ-ні атайды. Параллель деп, ӘС өзара параллель КЖ-ні атайды. Кез келген деп ӘС қиылыспайтын және параллель емес КЖ-сі аталады. Аталған КЖ жазық және кеңістік болуы мүмкін. Егер барлық күштердің ӘС бір жазықтықта жатса, КЖ жазық деп, керісінше жағдайда кеңістік деп аталады.
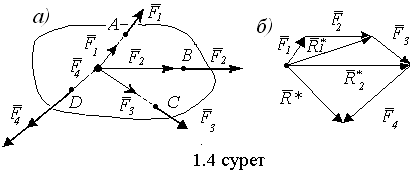 Дененің А, В, С, D нүктелерінде әсер ету сызықтары О нүктеде қиылысатын
Дененің А, В, С, D нүктелерінде әсер ету сызықтары О нүктеде қиылысатын  күштері түседі дейік (1.4, а сурет). Күштерді олардың ӘС бойымен О нүктеге көшіріп, оларды тізбектеп күштер үшбұрышы ережесімен қосамыз (1.4 б сурет). Алдымен
күштері түседі дейік (1.4, а сурет). Күштерді олардың ӘС бойымен О нүктеге көшіріп, оларды тізбектеп күштер үшбұрышы ережесімен қосамыз (1.4 б сурет). Алдымен  ,
,  күштерінің тең әсерлі
күштерінің тең әсерлі  күшін, сонан соң ,
күшін, сонан соң ,  күштерінің тең әсерлі
күштерінің тең әсерлі  күшін, сөйтіп т.б. табамыз. Сонда:
күшін, сөйтіп т.б. табамыз. Сонда:  ,
,  ,
,  =
=  . Күштер саны n болса, онда
. Күштер саны n болса, онда
 (1.1)
(1.1)
күшін былай да табуға болады: алдымен векторын тұрғызып, оның ұшынан векторын, содан кейін векторының ұшынан векторын және сөйтіп т.б. тұрғызамыз. Сонда тең әсерлі күші бірінші вектордың басын соңғы вектордың ұшымен қосады. Сонымен, тоғысатын КЖ-нің тең әсерлі күші жүйедегі күштердің векторлық қосындысына тең. Оның ӘС күштердің ӘС қиылысу нүктесінен өтеді. Тең әсерлі күшін геометриялық тәсілімен табу үшін күштердің қиылысу нүктесінде күш көпбұрышын тұрғызу керек; оның тұйықтаушысы тең әсерлі күші болып келеді.
Тоғысатын КЖ-нің тең әсерлі күшін аналитикалық тәсілмен анықталуын қарастырайық. Ол үшін (1.1) векторлық теңдеуінің декарт координат жүйесінің өстеріне проекцияларын жазып, тең әсерлі күшінің проекцияларын анықтаймыз
 ,
,  ,
,  . (1.2)
. (1.2)
Тең әсерлі күшінің модулі келесі формуламен табылады
 (1.3)
(1.3)
ал оның бағыты – үш бағыттаушы косинустар арқылы табылады
 ,
,  ,
,  . (1.4)
. (1.4)
Тоғысатын КЖ тепе-теңдік қалпында болуы үшін оның тең әсерлі күші нөлге тең болуы қажетті де, жеткілікті де, яғни  немесе
немесе  (тепе-теңдік шартының векторлық түрінде жазылуы). Тепе-теңдіктің геометриялық шарты – күш көпбұрышы тұйықталу керек, яғни соңғы күш векторының ұшы бірінші вектордың басымен түйісу керек. Тепе-теңдіктің аналитикалық шарттары - жүйедегі барлық күштердің үш координаттық өстеріне проекцияларының қосындылары нөлге тең болуы
(тепе-теңдік шартының векторлық түрінде жазылуы). Тепе-теңдіктің геометриялық шарты – күш көпбұрышы тұйықталу керек, яғни соңғы күш векторының ұшы бірінші вектордың басымен түйісу керек. Тепе-теңдіктің аналитикалық шарттары - жүйедегі барлық күштердің үш координаттық өстеріне проекцияларының қосындылары нөлге тең болуы
 ,
,  ,
,  . (1.5)
. (1.5)
Тоғысатын жазық КЖ-нің тепе-теңдік шарттары мына түрде жазылады
, . (1.6)
2 дәріс. Күштің нүктеге және өске қатысты моменті. Күштер жұбы. Күштер жүйесін берілген центрге келтіру
Дәрістің мазмұны: күштің нүктеге және өске қатысты моменті; күштер жұбы, күштер жұбының қасиеттері, күштер жүйесін центрге келтіру.
Дәрістің мақсаты: күштің нүктеге және өске қатысты моментінің қасиеттерін, күштер жұбының қасиеттерін, күштер жұптары жүйесін қарапайым түрге келтіруін және тепе-теңдік шарттарын, кез келген күштер жүйесін қарапайым түрге келтіруін зерттеу.
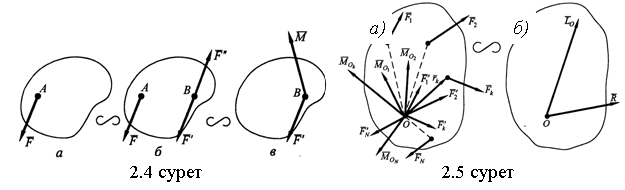
2.1 Күштің нүктеге қатысты және өске қатысты моменті
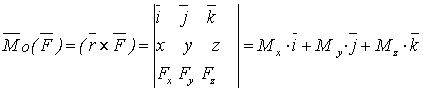
 күшінің О нүктесіне қатысты моменті деп О нүктесінде ОАВ үшбұрышының жазықтығына перпендикуляртүсетін және төмендегі формуламен анықталатын
күшінің О нүктесіне қатысты моменті деп О нүктесінде ОАВ үшбұрышының жазықтығына перпендикуляртүсетін және төмендегі формуламен анықталатын  векторы аталады (2.1 сурет)
векторы аталады (2.1 сурет)

 (2.1)
(2.1)
мұндағы  - О нүктсінен күші түсетін А нүктесіне жүргізілген радиус-вектор.
- О нүктсінен күші түсетін А нүктесіне жүргізілген радиус-вектор.
векторының модулі күштің F модулі мен О нүктесінен күштің әсер ету сызығына дейін ең қысқа қашықтығының, яғни күштің О нүктеге қатысты иінінің көбейтіндісіне тең
 =F∙h. (2.2)
=F∙h. (2.2)
моменті күшінің О нүктесіне қатысты айналдыру әсерін сипаттайды. радиус-векторы О нүктесінен тек қана А нүктесіне емес, күшінің әсер ету сызығында жатқан кез келген басқа нүктесіне де жүргізілуі мүмкін. Егер нүкте күштің әсер ету сызығында жатса, онда күштің нүктеге қатысты моменті нөлге тең болады (иіні нөлге тең).
 күштер жүйесі үшін барлық күштердің О нүктесіне қатысты векторлық моменттерінің қосындысына тең вектор
күштер жүйесі үшін барлық күштердің О нүктесіне қатысты векторлық моменттерінің қосындысына тең вектор
 (2.3)
(2.3)
күштер жүйесінің О нүктесіне қатысты бас моменті деп аталады.
Жазық күштер жүйесі үшін күштің нүктеге қатысты векторлық моментінің орнына күштің нүктеге қатысты алгебралық моментін қолданған ыңғайлы, өйткені бұл жағдайда барлық күштердің векторлық моменттері бір- біріне параллель болады. Күштің нүктеге қатысты алгебралық моменті деп күш модулінің күш иініне көбейтіндісі аталады
 . (2.4)
. (2.4)
Күш денені сағат тілінің қозғалысына қарсы бағытта айналдыруға тырысса алгебралық момент оң таңбамен, ал сағат тілінің қозғалысымен бағыттас айналдыруға тырысса теріс таңбамен алынады.
күшінің өске қатысты моменті деп оның өсте жатқан кез келген нүктеге қатысты векторлық моментінің сол өске проекциясы аталады, яғни
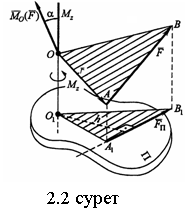
 . (2.5)
. (2.5)
күшінің Oz өсінің О нүктесіне қатысты моментінің өске проекциясы нүктенің өс үстіндегі орнына тәуелсіз.
Басқаша: күшінің өске қатысты моменті деп күштің өске перпендикуляр жазықтыққа түсірілген проекциясының жазықтық пен өстің қиылысу нүктесіне қатысты алгебралық моменті аталады (2.2 сурет)
 . (2.6)
. (2.6)
Күштің өске қатысты моменті, күш пен өс бір жазықтықта орналасса, нөлге тең. Күштің координат жүйесінің басына қатысты моменті (2.1) формуласына сай мына формуламен анықталады
 .
.
Осыдан күштің координат өстеріне қатысты моменттерін табамыз
 ,
,  ,
,  . (2.7)
. (2.7)
2.2 Параллель күштерді қосу
АҚД-ге түскен екі параллель және бір жаққа бағытталған күштердің тең әсерлі күші болады, оның модулі күштердің модульдерінің қосындысына тең, бағыты күштерге параллель және бағыттас. Тең әсерлі күштің ӘС-ғы берілген күштердің ӘС арасындағы түзу сызықты кесіндіні күштер модульдеріне кері пропорционал бөліктерге іш жағынан бөліп өтеді. Керісінше, кез келген күшті параллель және сол күшке бағыттас екі күшке жіктеуге болады.
Өзара тең емес, параллель және қарсы бағытталған екі күштің тең әсерлі күші күштердің модульдерінің айырмашылығына тең және үлкен күштің бағытымен бірдей болады. Тең әсерлі күшінің ӘС-ғы үлкен күштің ӘС сыртынан, күштердің ӘС арасындағы түзу сызықты кесіндіні күштер модульдеріне кері пропорционал бөліктерге сыртқы жағынан бөліп өтеді.
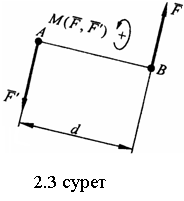
2.3 Күштер жұбы. Күштер жұбының моменті
АҚД түсетін күштер жұбы деп модульдері өзара тең, параллель, бір біріне қарсы бағытталған және бір түзуде жатпайтын екі күштің жүйесін атаймыз (2.3 сурет). Жұп құрайтын күштердің векторлық қосындысы нөлге тең, бірақ күштер жұбы теңгерілмейді. Күштердің ӘС арасындағы ең қысқа қашықтық жұптың иіні d деп, ал күштер орналасқан жазықтық жұптың әсер ету жазықтығы деп аталады. Денеге түсетін бірнеше жұптардың жиынтығы күштер жұптарының жүйесі деп аталады. Жұп тең әсерлі күшке келтірілмейді. Жұптың денеге әсері, шамасы ±F∙d тең болатын M  моментімен, жұптың әсер ету жазықтығының кеңістікте орналасуымен және жұптың денені айналдыруға тырысатын бағытымен сипатталады, сонда күштер жұбының моменті вектор болып табылады.
моментімен, жұптың әсер ету жазықтығының кеңістікте орналасуымен және жұптың денені айналдыруға тырысатын бағытымен сипатталады, сонда күштер жұбының моменті вектор болып табылады.
 Күштер жұбының векторлық моменті
Күштер жұбының векторлық моменті  – модулі жұп күшінің модулі мен жұп иінінің көбейтіндісіне тең вектор, оның бағыты жұптың әсер ету жазықтығына перпендикуляр және вектордың ұшынан қарағанда, жұп денені сағат тілінің қозғалысына қарсы айналдыруға тырысатын болып көрінеді. Күштер жұбын оның әсер ету жазықтығында және параллель жазықтыққа, күш модулі мен жұп иінін өзгертіп, бірақ жұп модулі мен оның денені айналдыруға тырысатын бағытын сақтап, көшіруге болады, яғни күштер жұбының векторлық моменті – еркін вектор.
– модулі жұп күшінің модулі мен жұп иінінің көбейтіндісіне тең вектор, оның бағыты жұптың әсер ету жазықтығына перпендикуляр және вектордың ұшынан қарағанда, жұп денені сағат тілінің қозғалысына қарсы айналдыруға тырысатын болып көрінеді. Күштер жұбын оның әсер ету жазықтығында және параллель жазықтыққа, күш модулі мен жұп иінін өзгертіп, бірақ жұп модулі мен оның денені айналдыруға тырысатын бағытын сақтап, көшіруге болады, яғни күштер жұбының векторлық моменті – еркін вектор.
Векторлық моменттері тең, бір жазықтықта немесе параллель жазықтықтарда орналасқан екі күштер жұбы, күш модульдері мен жұп иіндерінің шамаларына тәуелсіз, баламалы болады
Егер күштер жұптары бір жазықтықта орналасса, олардың векторлық моменттері сол жазықтыққа перпендикуляр, денені айналдыруға тырысатын бағытына сәйкес бір немесе екінші жаққа бағытталады. Бұл жағдайда жұптардың моменттерін алгебралық шамалар ретінде қарастырып, моменттің модулі мен таңбасы арқылы айыруға болады. Жұп денені сағат тілінің қозғалысына қарсы айналдыруға тырысса, оның моменті оң, керісінше жағдайда теріс болып саналады. Сонда күштер жұптарының жазық жүйесі үшін
 (2.8)
(2.8)
және  . (2.9)
. (2.9)
Жұптарды қосу туралы теорема: күштер жұптарының жүйесі векторлық моменті барлық жұптардың векторлық моменттерінің қосындысына тең бір ғана жұпқа баламалы, яғни  . Сонда қатты денеге әсер ететін күштер жұптары жүйесінің тепе-теңдік шарты келесідей жазылады
. Сонда қатты денеге әсер ететін күштер жұптары жүйесінің тепе-теңдік шарты келесідей жазылады
 . (2.10)
. (2.10)
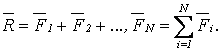
2.4 Күштерді параллель көшіру туралы теорема
Қатты денеге түсетін күшті оның денеге әсерін өзгертпей, дененің кез келген басқа нүктесіне, күштер жұбын қосып, өзіне параллель көшіруге болады (2.4 сурет); жұптың моменті күштің сол нүктеге қатысты моментіне тең болуы тиіс.
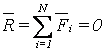
 2.5 Күштер жүйесін берілген центрге келтіру
2.5 Күштер жүйесін берілген центрге келтіру
АҚД-ге әсер ететін кез келген күштер жүйесін бір центрге келтіруге болады, сонда барлық күштер келтіру центріне түсетін жүйенің бас векторына тең бір күш пен моменті жүйенің сол центрге қатысты бас моментіне тең бір жұпқа ауыстырылады (2.5 сурет)
 (2.11)
(2.11)
 . (2.12)
. (2.12)
Мұнда  келтіру центрінің таңдалуына тәуелсіз, ал
келтіру центрінің таңдалуына тәуелсіз, ал  – тәуелді.
– тәуелді.
АҚД-ге әсер ететін екі күштер жүйесі, олардың бас векторлары бірдей және кез келген нүктеге қатысты бас моменттері бірдей болғанда баламалы.
Вариньон теоремасы: егер күштер жүйесінің тең әсерлі күші болса, оның кез келген нүктеге немесе өске қатысты моменті жүйенің барлық күштерінің сол нүктеге немесе өске қатысты моменттерінің қосындысына тең.
3 дәріс. Күштер жүйелерінің тепе-теңдік шарттары. Үйкеліс. Ауырлық центрі.
Дәрістің мазмұны: күштер жүйелерінің тепе-теңдік шарттары, сырғанау үйкелісі мен домалау үйкелісі, қатты денелердің ауырлық центрлері.
Дәрістің мақсаты: кеңістік және жазық күштер жүйелерінің тепе-теңдік шарттарын анықтау, үйкеліс болғанда есептерді шешудің ерешеліктерін қарастыру, денелердің ауырлық центрлерін анықтауды үйрену.
3.1 Күштер жүйесінің тепе-теңдік шарттары
Денеге әсер ететін кез келген күштер жүйесі оның бас векторына тең бір күшке және моменті жүйенің кез келген О центріне қатысты бас моментіне тең күштер жұбына баламалы. Олай болса күштер жүйесі тепе-теңдікте болу үшін және нөлге тең болуы қажетті де жеткілікті. Сондықтан тепе-теңдіктің шарттары векторлық түрде осылай жазылады
 , (3.1)
, (3.1)
 . (3.2)
. (3.2)
Бұл шарттар келесі тепе-теңдіктің аналитикалық шарттарына баламалы

 ,
,  ,
,  ,
,
 ,
,  ,
,  , (3.3)
, (3.3)
яғни АҚД-ге әсер ететін кез келген күштер жүйесінің тепе-теңдігі үшін барлық күштердің декарт координат жүйесінің үш өсіне проекцияларының қосындылары және сол өстерге қатысты барлық күштердің моменттерінің қосындылары нөлге тең болуы қажетті де жеткілікті.
Кеңістік параллель күштер жүйесі үшін (Oz өсі күштерге бағыттас) келесідей жазылады
, , . (3.4)
Кез келген жазық күштер жүйесінің тепе-теңдік шарттарының бірінші түрі: күштердің екі координат өсіне проекцияларының қосындылары және кез келген центрге қатысты күштердің алгебралық моменттерінің қосындысы нөлге тең болуы қажетті де жеткілікті
, ,  . (3.5)
. (3.5)
Екінші түрі
 ,
,  ,
,  , (3.6)
, (3.6)
мұнда  түзуі
түзуі  өсіне перпендикуляр емес болу керек.
өсіне перпендикуляр емес болу керек.
Үшінші түрі
 , , (3.7)
, , (3.7)
мұнда А, В, С бір түзудің бойында жатпау керек.
Жазық параллель күштер жүйесі үшін тепе-теңдік шарттары келесідей
, (3.8)
(мұнда Ox өсі күштерге перпендикуляр болмау керек) немесе
,  , (3.9)
, (3.9)
мұнда А мен В нүктелерінен өтетін түзу күштерге параллель болмау керек.
3.2 Денелер жүйесінің тепе-теңдігі
Денелер жүйесінің бөліктерін қосатын байланыстар ішкі байланыстар деп аталады. Егер сыртқы байланыстарды күштерге ауыстырса, тепе-теңдік шарттары оларды анықтау үшін жеткіліксіз болады. Есептерді шешу әдістері:
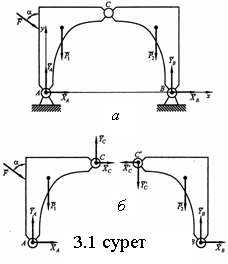 а) ішкі байланыстардың қасиеттерін қолданып, қосымша тепе-теңдік шарттарын құрады. Мысалы, 3.1, а суреттегі жүйе үшін төртінші теңдеу ретінде оның кез келген бір жартысына түсетін барлық күштердің С топсасына қатысты моменттерінің қосындысының нөлге тең болу теңдеуін алуға болады;
а) ішкі байланыстардың қасиеттерін қолданып, қосымша тепе-теңдік шарттарын құрады. Мысалы, 3.1, а суреттегі жүйе үшін төртінші теңдеу ретінде оның кез келген бір жартысына түсетін барлық күштердің С топсасына қатысты моменттерінің қосындысының нөлге тең болу теңдеуін алуға болады;
б) конструкцияны, оның ішкі байланыстарын күштерге ауыстырып, бөліктерге ойша жіктейді (3.1, б сурет). Әр бөлігі үшін үш тәуелсіз тепе-теңдік теңдеулерін құрып, олардан алты белгісізді табуға болады.
 3.3 Статикалық түрде анықталатын және статикалық түрде анықталмайтын жүйелер
3.3 Статикалық түрде анықталатын және статикалық түрде анықталмайтын жүйелер
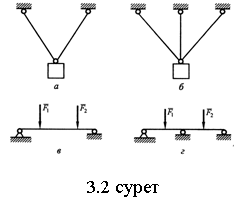
Егер байланыстар реакцияларының белгісіз құраушыларының саны тәуелсіз тепе-теңдік теңдеулерінің санына тең болса (3.2 а, в сурет), қарастырылатын жүйе статикалық түрде анықталатын, одан артық болса статикалық түрде анықталмайтын жүйе деп аталады (3.2, б,г сурет). Статикалық түрде анықталмайтын жүйелердегі реакцияларды теориялық механикада АҚД үшін берілген әдістермен табу мүмкін емес. Мұндай есептерді шешу үшін денелердің деформациялануын есепке алып, қосымша деформациялардың теңдеулерін құру керек.
3.4 Сырғанау үйкелісі. Тегіс емес беттің реакциясы
 Сырғанау үйкелісінің Кулон – Амонтон заңдары:
Сырғанау үйкелісінің Кулон – Амонтон заңдары:
1. Бір денені басқа дене үстінде ығыстыруға тырысқан жағдайда олардың жанасу жазықтығында үйкеліс күші пайда болады, оның модулі 0 ≤ F≤ Fmax аралығында кез келген мәнге ие болуы мүмкін. Үйкеліс күші денеге түседі және күш түскен нүктенің мүмкін жылдамдығына қарама-қарсы болады.
2. Максималды үйкеліс күші f үйкеліс коэффициенті мен N нормаль қысым күшінің көбейтіндісіне тең
Fmax=f∙N. (3.10)
Үйкеліс коэффициенті жанасатын денелердің материалдары мен беттерінің қалпына (кедір-бұдырлығына, температурасына, ылғалдылығына және т.б.) тәуелді өлшем бірліксіз шама, ол тәжірибе арқылы анықталады. f мәндері: ағаш пен ағаш арасында 0,4-0,7; металл мен металл - 0,15-0,25; болат пен мұз - 0,027.
Тыныштық үйкелісі мен сырғанау үйкелісі айыра танылады. Тыныштық үйкелісінің коэффициенті тепе-теңдіктің шеткі қалпына, яғни сыртқы күштер кішкене ғана өскенде қозғалыс басталып кететін қалпына сәйкес келетін максималды Fmax үйкеліс күші арқылы анықталады. Әдетте ол сырғанау үйкелісінің коэффициентінен артық. Сырғанау жылдамдығының өсуімен сырғанау үйкелісінің коэффициенті басында шамалы азаяды, содан кейін айтарлықтай өзгермейді.
3. Максималды үйкеліс күші едәуір кең шектерде жанасатын беттердің ауданына тәуелсіз.
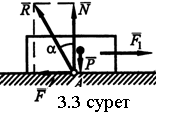
Тегіс емес беттің реакциясы екі құраушы күштер арқылы есепке алынады:  нормаль реакциясы (оның модулі нормаль қысым күшіне тең) және оған перпендикуляр үйкеліс күші (3.3 сурет). Толық реакция
нормаль реакциясы (оның модулі нормаль қысым күшіне тең) және оған перпендикуляр үйкеліс күші (3.3 сурет). Толық реакция  нормаль бағыттан α бұрышына ауытқиды (tg α = F/N).
нормаль бағыттан α бұрышына ауытқиды (tg α = F/N).
Егер дене горизонталь тегіс емес беттің үстінде болып, оған ауырлық күштен басқа ешқандай сыртқы күш түспесе, онда F = 0, ал толық реакция R = N және тіреуіш бетіне перпендикуляр болады. Денеге шамасы аз күшін түсіріп, біз оны қозғалтуға тырыссақ, қозғалыс бола қалмайды, өйткені  үйкеліс күші пайда болады, және F≤ Fmax. күші артқан сайын үйкеліс күші де артады. F1 = Fmax болғанда тепе-теңдіктің шеткі қалпы орын алады, сонда толық реакция вертикальдан үйкеліс бұрышы деп аталатын αmax бұрышына ауытқиды. Оны φ арқылы белгілеп, үйкеліс бұрышының тангенсі үйкеліс коэффициентіне тең екенін анықтаймыз
үйкеліс күші пайда болады, және F≤ Fmax. күші артқан сайын үйкеліс күші де артады. F1 = Fmax болғанда тепе-теңдіктің шеткі қалпы орын алады, сонда толық реакция вертикальдан үйкеліс бұрышы деп аталатын αmax бұрышына ауытқиды. Оны φ арқылы белгілеп, үйкеліс бұрышының тангенсі үйкеліс коэффициентіне тең екенін анықтаймыз
tg φ= Fmax/N=f. (3.11)
Идеалды емес байланыстың толық реакциясының бағыты үйкеліс бұрышымен шеттеледі. Әдетте денелердің сырғанау үйкеліс күші ескерілуімен тепе-теңдіктің шеткі қалпы үшін үйкеліс күші максималды шамасына ие болғанда қарастырылады. Идеалды емес байланыстың реакциясы екі құраушымен көрсетіледі: N нормаль реакциясымен және Fmax максималды үйкеліс күшімен.
3.5 Домалау кезіндегі байланыстың реакциясы
3.4, а суретте домалау кезінде цилиндр тіреуші бетке жаншылып, онымен домалау бағыты жағына ығысқан СD доғасымен кескінделетін бетпен өзара әрекеттескені көрсетілген.
Тіреуші беттің цилиндрге толық реакциясы беттің деформациясынан туындаған таралған күштердің қосындысы ретінде цилиндр домалауына кедергі жасайды. Бір дененің басқа дененің бетінде домалау кезінде пайда болатын кедергі домалау үйкелісі деп аталады. Инженерлік есептеулер жүргізуде керегі - домалауға кедергі моменті (3.4, б сурет). Құбылыстың сұлбасын жасағанда, домалау деформацияланбайтын бетінде қарастырылады, ал толық реакциясы А нүктеден δ шамасына ығысқан В нүктесіне түсетін екі құраушы күш арқылы көрсетіледі (3.4, в сурет. күші – сырғанау үйкеліс күші, ал - нормаль реакциясы. Тепе-теңдік теңдеулерінен келесі анықталады
N = P, F = Q, Qmax∙r = δ∙N. (3.12)
Келесі көбейтінді δ∙N = (Мкед)max домалауға кедергі моменті, яғни домалау үйкелісі деп аталады. Егер Q күші аз болса, N күшінің вертикаль диаметрінен ауытқуы да аз болады; Q өсуімен бұл ауытқу артады. Qmax болғанда цилиндр тепе-теңдіктің шеткі қалпына жетеді, сонда N нормаль реакциясы вертикаль диаметрінен домалау үйкелісінің коэффициенті деп аталатын, δ шеткі қашықтығында өтеді. δ коэффициенті жанасатын денелер материалдардың қасиеттеріне және беттерінің қалпына тәуелді, ол тәжірибелік түрде анықталады. Мысалы, рельс үстімен дөңгелек домалаған кезде δ = 0,005 см, шарик подшипнигінде δ = 0,001 см.
3.6 Қатты дененің ауырлық центрі
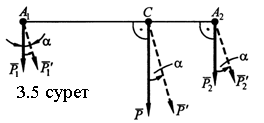
Дененің А1, A2 нүктелерінде түсетін екі параллель  және
және  күштерін қарастырайық (3.5 сурет).
күштерін қарастырайық (3.5 сурет).  тең әсерлі күшінің әсер ету сызығы қосылатын күштерге параллель және A1A2 түзуінде жатқан С нүктесінен өтеді. С нүктесінің орнын Вариньон теоремасын қолданып анықтай аламыз:
тең әсерлі күшінің әсер ету сызығы қосылатын күштерге параллель және A1A2 түзуінде жатқан С нүктесінен өтеді. С нүктесінің орнын Вариньон теоремасын қолданып анықтай аламыз:  , осыдан
, осыдан
 . (3.13)
. (3.13)
, күштерін А1, А2 нүктелерінің айналасында бірдей α бұрышына бұрғанда, тең әсерлі күші де сол бағытта α бұрышына бұрылады және дәл сол С нүктесіне түседі. С нүктесі параллель күштердің центрі деп аталады. Кез келген күштер саны үшін де осылай болады.
Дене бөлшектеріне түсетін  ,
,  ,…,
,…,  ауырлық күштерінің тең әсерлісін
ауырлық күштерінің тең әсерлісін  деп белгілейік (3.6 сурет). Осы күштің модулі дененің салмағы деп аталады және келесі теңдікпен анықталады
деп белгілейік (3.6 сурет). Осы күштің модулі дененің салмағы деп аталады және келесі теңдікпен анықталады
 . (3.14)
. (3.14)
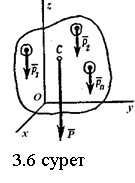 С нүктесі
С нүктесі  параллель ауырлық күштерінің центрі болып келеді, ол дененің ауырлық центрі деп аталады. Сонымен, АҚД-нің ауырлық центрі – денемен өзгеріссіз байланысқан дененің кеңістікте кез келген орналасуында дене бөлшектеріне түсетін ауырлық күштерінің тең әсерлі күшінің әсер ету сызығы өтетін нүкте. Ауырлық центрінің координаттары келесі формулалармен анықталады
параллель ауырлық күштерінің центрі болып келеді, ол дененің ауырлық центрі деп аталады. Сонымен, АҚД-нің ауырлық центрі – денемен өзгеріссіз байланысқан дененің кеңістікте кез келген орналасуында дене бөлшектеріне түсетін ауырлық күштерінің тең әсерлі күшінің әсер ету сызығы өтетін нүкте. Ауырлық центрінің координаттары келесі формулалармен анықталады
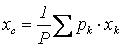 ,
,  ,
,  (3.15)
(3.15)
мұндағы  ,
,  ,
,  – ауырлық
– ауырлық  күштері түсетін нүктелердің координаттары.
күштері түсетін нүктелердің координаттары.
4 дәріс. Нүктенің және дененің қарапайым қозғалыстарының кинематикасы
Дәрістің мазмұны: кинематиканың кіріспе ұғымдары, нүкте кинематикасы, траектория, нүктенің жылдамдығы мен үдеуі; қатты дененің ілгерілемелі, айналмалы және жазық параллельқозғалыстары.
Дәрістің мақсаты: нүкте қозғалысыныңжәне қатты дененің қарапайым қозғалыстарының кинематикалық сипаттамаларын қарастыру.
4.1 Кинематикаға кіріспе
Кинематика – денелер қозғалыстарының геометриялық қасиеттерін, денелердің инерттілігі мен оларға әсер ететін күштерді ескермей зерттейтін механика бөлімі. Қозғалыс ретінде дененің координат жүйесімен бірігіп, санақ жүйесін (СЖ) құрайтын басқа денелерге қатысты кеңістікте орналасуының уақыт өтуімен өзгеруін түсінеді. СЖ кинематикада еркінше таңдап алынады.
Денелердің қозғалысы кеңістікте уақыт өтуімен орындалады. Кеңістік үш өлшемді Евклид кеңістігі ретінде қарастырылады. Уақыт барлық СЖ бірдей өтеді деп есептеледі. Кинематика есептерінде t уақыты тәуелсіз айнымалы (аргумент) ретінде алынады. Басқа айнымалылардың барлығы (арақашықтар, жылдамдықтар және т.б.) t аргументінің функциялары ретінде қарастырылады. Уақыт бір бастапқы уақыт мезгілінен есептеледі.
Кинематика есептерін шешу үшін дененің (нүктенің) қарастырылатын қозғалысы кинематикалық түрде берілу керек, яғни дененің (нүктенің) кез келген уақыт мезгілінде берілген СЖ-не қатысты орналасуы берілу керек. Қозғалысты зерттеу оның берілу тәсілдерін анықтаудан басталады. Кинематиканың негізгі мақсаты – нүктенің (дененің) қозғалыс заңын біліп, қозғалысты сипаттайтын барлық кинематикалық шамаларды табу әдістерін анықтау.
Қозғалатын нүктенің берілген СЖ-не қатысты кескіндейтін үздіксіз сызығы нүктенің траекториясы деп аталады. Траектория түзу болса, нүкте қозғалысы түзу сызықты, қисық болса қисық сызықты деп аталады.
4.2 Нүкте қозғалысының берілу тәсілдері
Нүктенің қозғалысы үш тәсілдердің біреуімен берілуі мүмкін.
1. Векторлық тәсіл. М нүктесі Oxyz санақ жүйесіне қатысты қозғалатын болсын. Нүктенің кез келген уақыт мезетіндегі орнын, оның  радиус-векторының (4.1 сурет) t уақытына тәуелдігін беріп, анықтауға болады.
радиус-векторының (4.1 сурет) t уақытына тәуелдігін беріп, анықтауға болады.
 . (4.1)
. (4.1)
Бұл векторлық түрде жазылған нүктенің қозғалыс заңы.
2. Координаттық тәсіл. Нүктенің орнын оның уақыт өтуімен өзгеретін координаттарымен тікелей анықтауға болады
 . (4.2)
. (4.2)
Бұл - тік бұрышты декарт координаттарындағы нүктенің қозғалыс заңы.


3. Табиғи тәсіл. Нүкте қозғалысын табиғи тәсілмен беру – бұл оның траекториясын (4.2 сурет), траекториясындағы санақ басы мен санақ бағытын және қозғалыс заңын келесі түрде беру
 . (4.3)
. (4.3)
4.3 Қозғалыс векторлық тәсілімен берілген жағдайда нүктенің жылдамдығы мен үдеуі
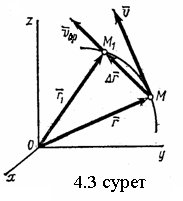
Нүкте қозғалысының негізгі кинематикалық сипаттамаларының біреуі жылдамдық болып келеді. t уақыт мезетінде радиус-векторымен анықталатын М орнында, ал t1 уақыт мезетінде  радиус-векторымен анықталатын М1 орнында болсын дейік (4.3 сурет). Сонда
радиус-векторымен анықталатын М1 орнында болсын дейік (4.3 сурет). Сонда  уақыт аралығында нүктенің орын ауыстыруы
уақыт аралығында нүктенің орын ауыстыруы  орын ауыстыру векторымен анықталады. ОММ1 үшбұрышынан
орын ауыстыру векторымен анықталады. ОММ1 үшбұрышынан  болатыны көрінеді, яғни
болатыны көрінеді, яғни  . Орын ауыстыру векторының сәйкес уақыт аралығына қатынасы, нүктенің Dt уақыт аралығындағы модулі мен бағыты бойынша ортақ жылдамдығы деп аталатын векторлық шамасын береді,
. Орын ауыстыру векторының сәйкес уақыт аралығына қатынасы, нүктенің Dt уақыт аралығындағы модулі мен бағыты бойынша ортақ жылдамдығы деп аталатын векторлық шамасын береді,  .
.
 векторлық шамасы нүктенің t уақыт мезетіндегі жылдамдығы деп аталады, сонда нүктенің жылдамдығы векторының t аргументі бойынша бірінші ретті туындысы болып келеді
векторлық шамасы нүктенің t уақыт мезетіндегі жылдамдығы деп аталады, сонда нүктенің жылдамдығы векторының t аргументі бойынша бірінші ретті туындысы болып келеді
 . (4.4)
. (4.4)
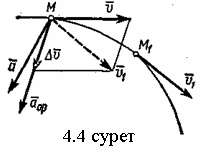
Нүктенің үдеуі - оның жылдамдығының модулі мен бағытының уақыт өтуімен өзгеруін сипаттайтын векторлық шама. Әлдебір t уақыт мезетінде нүктенің орны М және жылдамдығы  болсын, ал t1 мезетінде нүкте M1 орнына келіп,
болсын, ал t1 мезетінде нүкте M1 орнына келіп,  жылдамдығына ие болады дейік (4.4 сурет). Сонда уақыт аралығында нүктенің жылдамдығы
жылдамдығына ие болады дейік (4.4 сурет). Сонда уақыт аралығында нүктенің жылдамдығы  өсімін алады, ол әрқашан траекториясының ойыс жағына бағытталады.
өсімін алады, ол әрқашан траекториясының ойыс жағына бағытталады.  векторының Dt аралығына қатынасы нүктенің сол ауқыт аралығындағы орташа үдеуін анықтайды. Dt нөлге ұмтылған кезде
векторының Dt аралығына қатынасы нүктенің сол ауқыт аралығындағы орташа үдеуін анықтайды. Dt нөлге ұмтылған кезде  ұмтылатын векторлық шама
ұмтылатын векторлық шама
 (4.5)
(4.5)
нүктенің берілген t уақыт мезетіндегі үдеуі деп аталады. Сонымен, нүктенің берілген уақыт мезетіндегі үдеу векторы жылдамдық векторының уақыт бойынша бірінші ретті туындысына, яғни нүктенің радиус-векторының екінші ретті туындысына тең.
4.4 Қозғалыс координаттық тәсілімен берілген жағдайда нүктенің жылдамдығы мен үдеуі
Келесі теореманы қолданамыз: вектордың туындысының қарастырылатын СЖ-нің қозғалмайтын өсіне проекциясы вектордың сол өске проекциясының туындысына тең.
Сонда жылдамдықтың проекциялы үшін келесі орын алады
 (4.6)
(4.6)
немесе  . (4.7)
. (4.7)
Сонымен, жылдамдықтың координаттық өстерге проекциялары сәйкес координаттардың уақыт бойынша бірінші ретті туындыларына тең.
Үдеудің проекциялары үшін келесі болады
 ,
,  ,
,  (4.8)
(4.8)
немесе  , (4.9)
, (4.9)
яғни үдеудің координаттық өстерге проекциялары жылдамдықтың сәйкес проекцияларының уақыт бойынша бірінші ретті туындыларына немесе кординаттардың екі ретті туындыларына тең.
4.5 Қозғалыс табиғи тәсілімен берілген жағдайда нүктенің жылдамдығы мен үдеуі
Мұнда мен  векторларын олардың Мtnb табиғи үшжақтықтың М нүктесінен басталып, сонымен бірге қозғалатын өстеріне проекциялары арқылы табылады. Өстердің бағыттары: Мt - s санағының оң бағытына сәйкес траекторияға жанама бойынша; Мn бас нормалі – траекториямен жанасу жазықтығында траекторияның ойыс жағына жүргізілген нормалі бойынша; Mb бинормалі – алдынғы екі өске перпендикуляр бойынша олармен оң өстер жүйесін құрайтын болып бағытталады.
векторларын олардың Мtnb табиғи үшжақтықтың М нүктесінен басталып, сонымен бірге қозғалатын өстеріне проекциялары арқылы табылады. Өстердің бағыттары: Мt - s санағының оң бағытына сәйкес траекторияға жанама бойынша; Мn бас нормалі – траекториямен жанасу жазықтығында траекторияның ойыс жағына жүргізілген нормалі бойынша; Mb бинормалі – алдынғы екі өске перпендикуляр бойынша олармен оң өстер жүйесін құрайтын болып бағытталады.
Нүктенің жылдамдығын анықтаймыз
 . (4.10)
. (4.10)
Нүкте жылдамдығының траекториясына жанама өсіне проекциясы
 . (4.11)
. (4.11)
Осыдан шығар  және жылдамдықтың модулі
және жылдамдықтың модулі  .
.
Нүктенің үдеуі үшін
 . (4.12)
. (4.12)
Мұнда  (ρ – қарастырылатын орнында нүктенің траекториясының қисықтық радиусы), сонда
(ρ – қарастырылатын орнында нүктенің траекториясының қисықтық радиусы), сонда
 , (4.13)
, (4.13)
яғни үдеу векторы жанама және нормаль құраушыларының қосындысына тең
 . (4.14)
. (4.14)
 векторы жанасу жазықтығында жатады, яғни Mtn жазықтығында. (4.13) теңдігінің екі жағын Мt, Мn және Mb өстеріне проекциялап, келесіге келеміз
векторы жанасу жазықтығында жатады, яғни Mtn жазықтығында. (4.13) теңдігінің екі жағын Мt, Мn және Mb өстеріне проекциялап, келесіге келеміз
 . (4.15)
. (4.15)
4.6 Қатты дененің ілгерілемелі қозғалысы
АҚД-нің ілгерілемелі қозғалысы деп денеде жүргізілген кез келген түзу өзіне параллель болып қала беретін қозғалысты айтады, сонда дене нүктелерінің траекториялары қисық болулары мүмкін. Келесі теорема орын алады: ілгерілемелі қозғалыста дене нүктелері бірдей траекторияларды кескіндейді және әр уақыт мезгілінде модульдері мен бағыттары бірдей жылдамдықтар мен үдеулерге ие болады. Бұл жағдайда АҚД-нің кинематикасы нүктенің кинематикасына келтіріледі.
4.7 Қатты дененің тұрақты өс төңірегіндегі айналмалы қозғалысы
АҚД-нің тұрақты (қозғалмайтын) өс төңірегінде айналғанда, оның өсте жатқан нүктелері қозғалмайды (4.5 суретіндегі АВ). Өс арқылы екі жазықтық жүргізейік – қозғалмайтын және денемен байланысып қозғалатын жазықтықты. Олардың арасындағы екі жақтық j бұрышы дененің бұрылу бұрышы деп аталады, ол айналу өсінің оң бағыты жағынан қарағанда сағат тілінің қозғалысына қарсы болып көрінгенде, оң болып есептеледі. АҚД-нің тұрақты өс төңірегіндегі айналу заңы – келесі тәуелділік
 j = j (t). (4.16)
j = j (t). (4.16)
Бұрыштық жылдамдық j бұрышының уақыт өтуімен өзгеруін сипаттайды
w = dj/dt, яғни  . (4.17)
. (4.17)
Дененің бұрыштық жылдамдығын модулі |w| тең және айналу өсінің бойымен, ұшынан қарағанда дене сағат тілінің қозғалысына қарсы айналатын болып, бағытталған  векторымен кескіндеуге болады.
векторымен кескіндеуге болады.
 Бұрыштық үдеу бұрыштық жылдамдығының уақыт өтуімен өзгеруін сипаттайды
Бұрыштық үдеу бұрыштық жылдамдығының уақыт өтуімен өзгеруін сипаттайды
e = dw/dt = d2 j/dt2, яғни  . (4.18)
. (4.18)
Егер қозғалыс кезінде w=const болса, айналу бірқалыпты деп аталады. (4.17) формуласын интегралдап, айналу заңын анықтаймыз
 . (4.19)
. (4.19)
Бірқалыпты айналу кезінде  болса, онда
болса, онда
 . (4.19’)
. (4.19’)
Егер қозғалыс кезінде бұрыштық үдеу тұрақты болса(e=const), айналу бірқалыпты айнымалы деп аталады, оның заңы келесі түрде жазылады
 . (4.20)
. (4.20)
Егер w мен e таңбалары бірдей болса, айналу – бірқалыпты үдемелі, әртүрлі болса, бірқалыпты кемімелі болады.
Айналатын дене нүктелерінің жылдамдықтары мен үдеулерін анықтаймыз (4.6 сурет).
Айналу кезінде М нүктесі радиусы h тең, жазықтығы айналу өсіне перпендикуляр және P центрі өсте жататын шеңберді кескіндейді. dt уақыт ішінде дене dφ бұрышына бұрылады, М нүктесі ds = h∙ dφ орын ауыстыру жасайды.

