 2015-02-04
2015-02-04 846
846В транспортно-накопительных системах используют приводы структурно состоящих из двигателя (электрических, пневматических и гидравлических), передаточно - преобраующих механизмов (ременные, цепные, зубчатые, реечные, винт-гайка, кривошипно-шатунные передачи и др. с преобразованием вида движения) и исполнительных механизмов ТНС:
- с возвратно-поступательным движением для осуществления которого применяются гидравлические или пневматические цилиндры.
- для осуществления вращательного движения применяют - механические кулисные, кривошипно-шатунные и цепные в которых применяют электрические, гидравлические и пневматические двигатели непосредственно или через передаточно -преобразующий механизм.
- для осуществления возвратно-поступательного движения применяют пластинчатые, реечные кривошипные и т.п. устройства для приведения в действие которых используют различные виды энергоносителей.
В гидравлических и пневматических цилиндрах штоки поршней соединяются со штангами конвейеров передавая тем самым поступательные несинхронные движения на несущие элементы конвейера.
Движение совершается до упора (регулировка длины хода) и контролируется путевыми переключателями.
Поршневые приводы применяют для штанговых конвейеров и для других устройств при ходе не более 1,5 м. Более часто используют гидроприводы, т.к. они обеспечивают высокую надёжность и равномерность работы (благодаря малой упругости масла). Кроме того гидроцилиндры работают при давлении масла (4-5 Мпа)(40-50 кгс/см2) что позволяет применять небольшие диаметры цилиндров при значительных тяговых силах.
Пневматические цилиндры применяют реже из-за высокой сжимаемости воздуха. Пневматические цилиндры работают при давлении не более (0,4-0,5Мпа), для получения тяговых усилий используют большие по размерам цилиндры.
Механические привода применяют при высоких скоростях перемещения до 40 м/мин, когда не требуется регулирования. Так вращательное движение двигатель – редуктор – колесо – кулиса – штанга конвейера переходит в поступательное. Происходит вращательно – качательное движение кулисы и поступательное штанги.
В крайних положениях кулиса останавливается с помощью тормозов. Применяют также и механические приводы с кривошипно - шатунным механизмом.
При перемещениях конвейера более 1,5м применяют цепной привод. В нём применена бесконечная цепь натянутая на две звёздочки. К цепи прикреплён шатун – ползун который направляется специальным рейсом. Цепь приводится в движение от двигателя через редуктор, тащих за собой шатун который в свою очередь передвигает возвратно – поступательно ползун связанный со стоком конвейера.
Возвратно – поступательные привода применяют для поворота штанг, кантователей и т.п. устройств.
Для поворота на угол свыше 2800 применяют реечный механизм. В обеих механизмах движения прерывистые угловые по часовой и против часовой и зависят от длины рейки – длины хода.
Для поворота на угол до 900 применяют кривошипный механизм.
Для синхронного постоянного движения конвейеров применяют в основном электродвигатели через редуктор или цепную, или ременную передычу, через приводной барабан для ленточных конвейеров или через звёздочки цепные конвейеры и т.п. устройства.
Порядок выбора двигателя и его расчёт аналогичен порядку выбора двигателя и расчёта для ПР см. соотв. раздел лекций.
Гидравлический или пневматический привод движение возвратно – поступательное для шаговых конвейеров, отсекателей, делителей потока, фиксаторов и т.п. устройств (рис.5.1.)
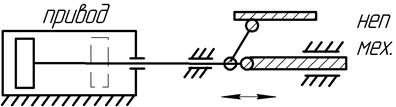
Рис. 5.1.
Механический привод вращательно-качающегося движение в поступательное. Для шаговых конвейеров, отсекателей, делителей, фиксаторов, поворотных устройств. Шаг определяет размер кулисы. Схема приведена на рис. 5.2.
Механизм с кривошипно шатунным приводом применяют для отсекателей, делителей потока, фиксаторов, толкателей, поворотных устройств, шаговых конвейеров и др. Схема приведена на рис рис 5.3.
Механизм цепного привода применяют для шаговых транспортеров.Схема приведена на рис. 5.4.
Механизм реечного привода применяют для перемещения поворотных устройств. Схема приведена на рис.5.5.
Механизм передачи винт- гайка применяются для линейного перемещения различных устройств. Схема приведена на рис. 5.6.
Механизм привода от электродвигателя применяют для привода ленточных и цепных конвейеров с орбитальным движением. Схема приведена на рис.рис 5.7.
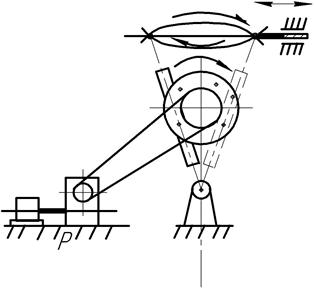
Рис. 5.2. Схема вращательно- качающегося привода
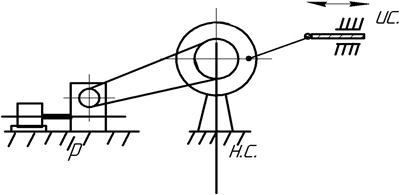
Рис. 5.3. Схема привода кривошипно - шатунного механизма.
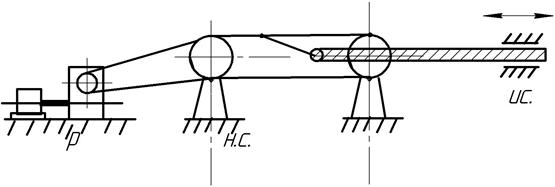
Рис. 5.4.Схема цепного привода.
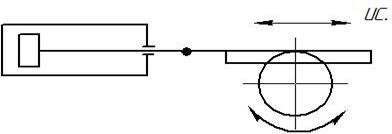
Рис. 5.5. Схема реечной передачи.
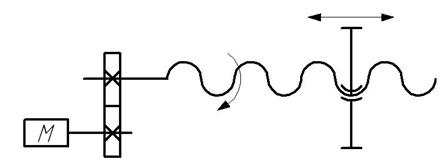
Рис. 5.6. Схема передачи винт-гайка.
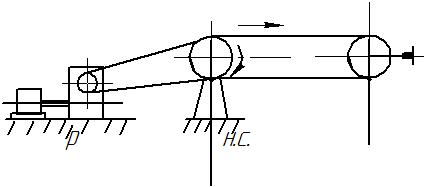
Рис. 5.7. Схема цепного привода.
6.Управление и блокировка .
Взаимная связь ТНС с основным оборудованием осуществляется через комплекс дискретно-релейно-контактной аппаратуры, связь между которыми и взаимодействие основано на применении путевого контроля, обеспечивающего чёткую последовательность технологических и транспортных операций и взаимосвязь между ними.
В ТНС применяют почти все типы датчиков и устройств обработки, преобразования и усиления сигналов от них что применяются в основном технологическом оборудование и промышленных роботах ПР. Здесь применяются как контактные и бесконтактные системы датчиков.
В зависимости от поставленных задач, от точности перемещений и фиксации от внешней среды и т.п. применяют различные виды и типы датчиков.
Порядок их выбора и применения определяется по тем же принципам, что и для ПР, но уже применённого технологического оборудования в комплексе с ТНС, ПР. Работа всех датчиков на ТНС и на оборудование должны иметь обратную связь с исполнительными механизмами. Особенно это важно для блокировок и обеспечения техники безопасности.
В автоматических АЛ установка систем датчиков и их функционирование на ТНС, на техн. оборудовании на ПР должны быть сведены в одну общую систему управления.
Каждая система АЛ должна работать в двух режимах: наладочном и автоматическом – это приводит к выводу на панель общей системы управления кнопок включения остановки, наладка, автомат для каждой ситемы отдельно и для всей АЛ. Часто всё оборудование, на панели управления, изображается мнемоническими лампочками красной и зелёной.
Кроме общей панели на каждое оборудование и на ПР и на конвейер имеются свои панели управления.
В АЛ со сквозным транспортом должны быть выполнены блокировки:
1) Ни одно из технологического оборудования не должно начать обработку, пока конвейер движется вперёд;
2) До момента возвращения всего тех. Оборудования в исходное положение конвейер не должен начинать движения.
3) Движение транспортера назад может происходить как при работающем оборудовании, так и при нахождении в исходном положении.
В АЛ с несквозными транспортными системами должны быть выполнены блокировки уже с учётом наличия загрузочно-разгрузочных механизмов на каждом станке:
1) Ни один из станков не должен начинать работу до тех пор, пока загрузочно-разгрузочные механизмы не закончат свои движения.
2) Ни одно из загрузочно-разгрузочных. устройств не должен начать движение, пока станки работают или движется конвейер.
3) Конвейер может двигаться только при неподвижных загрузочно-разгрузочных. механизмах и если они находятся на нейтральном положении.
4) Новый цикл ТНС начинается только после сигнала от всех станков об окончания или работы и возвращении их в исходное положение.
Перед запуском АЛ должен обязательно подаваться звуковой и световой сигнал о её запуске – для обеспечения ТБ.








