 2015-03-07
2015-03-07 748
748Имеем номинальную обобщенную скорость, механический момент и зазор. Как изменятся токи, если увеличить напряжение в 2 раза?
Ответ. Магнитный поток увеличится в 2 раза. Активный ток уменьшится в два раза. Реактивный ток увеличится в два раза.
Имеем номинальное напряжение, механический момент, не зависящий от обобщенной скорости (в частности, не зависящий от частоты вращения), и зазор. Как изменятся токи, если увеличить обобщенную скорость в 2 раза?
Ответ. Магнитный поток уменьшится в 2 раза, активный ток увеличится в 2 раза, реактивный ток уменьшится в 2 раза.
Имеем номинальное напряжение, механический момент и обобщенную скорость. Как изменятся токи, если увеличить зазор в 2 раза?
Ответ. Магнитный поток не изменится. Активный ток не изменится. Реактивный ток увеличится в 2 раза.
Имеем номинальный механический момент и зазор. Как изменятся токи, если увеличить напряжение и обобщенную скорость в 2 раза?
Ответ. Магнитный поток не изменится, активный ток не изменится, реактивный ток не изменится.
Идут швартовные испытания. Нагрузочное устройство представляет собой набор активных сопротивлений и индуктивных сопротивлений в виде стальных сердечников с обмоткой. Стальные сердечники имеют регулируемый зазор. Оказалось, что косинус фи равен 0,9, а по условиям испытаний надо, чтобы косинус фи был равен 0,8. Что надо сделать, чтобы косинус фи удовлетворял требованиям испытаний.
Ответ. Имеем недостаток реактивного тока. Значит, зазор надо увеличивать до тех пор, пока косинус фи не станет 0,8.
В качестве практического примера использования полученного результата решим следующие две задачи.
Пришли в Америку, стали в док. Частота сети — 60 Гц. Напряжение в доке — 420 В. Просят включить вентилятор. Надо принять решение. Следует произвести расчет с целью определения допустимости данной операции. Номинальный косинус фи практически всех электрических машин — 0,8. Это означает, что активный ток — 0,8 от номинального тока, номинальный реактивный ток — 0,6 от номинального тока. Это надо принять во внимание в начале расчета.
Приложено напряжение u= 420/380=1,105, обобщенная скорость v=60/50=1,2, магнитный поток ϕ = u/φ=1,105/1,2=0,96. Зазор остался неизменным, номинальным, равным 1, поэтому реактивный ток будет 0,96 от номинала. То есть реактивный ток будет 0,96*0.6=0,576.
Вентиляторные механизмы имеют момент, пропорциональный квадрату частоты. Поэтому момент будет 1,22=1,44. Активный ток будет (1,44/0,96)0,8=1,2. В роторе асинхронного двигателя ток равен активному току. Нагрев ротора пропорционален квадрату тока. Ротор перегреется в 1,22=1,44 раза. Общий ток будет (0,5762+1,22)^0,5=(0,33+1,44)^0,5=1,33. Перегрев статора будет 1,77, почти в 2 раза. Операция недопустима.
Те же условия. Надо принять решение относительно подъема груза на лебедке. Просят поднять половинный груз. Решаем. Приложено напряжение u= 420/380=1,105, обобщенная скорость v=60/50=1,2, магнитный поток ϕ = u/φ=1,105/1,2=0,96. Зазор остался неизменным, номинальным, равным 1, поэтому реактивный ток будет 0,96*0,6=0,58. Лебедка имеет компрессорную механическую характеристику (момент не зависит от частоты). Активный ток будет 0,5/0,96=0,52. Перегрева ротора не будет. Полный ток (0,582+0,522) ^0,5=0,336. Операция допустима.
Следующий раздел «электромеханика» будет только учить, как решить те или иные практические задачи, используя изложенный метод электрического, механического и магнитного равновесия.
2.18. Задачи и вопросы для самопроверк
Методическое указание. Ввиду трудности нового восприятия
электричества, ниже приведенные задачи надо решить
с преподавателем, который тоже должен усвоить
ньютоновский способ мышления
1. В обычной штепсельной розетке расстояние между гнездами равно 18 мм, считать приблизительно 2 см. Будем считать, что между гнездами есть постоянное напряжение 220 В. Пусть между гнездами помещен и удерживается в стационарном состоянии заряд 1Кл. С какой силой удерживается заряд?
2. В деревянной раме окна изменяют магнитный поток, передвигая намагниченное железо. Будет ли наводиться ЭДС в раме окна?
3. Есть практическое правило направлять ЭДС внутри источника напряжения от минуса к плюсу, а напряжение во внешней цепи — от плюса к минусу. Нарисовать, куда будут действовать напряжение и ЭДС во внешней цепи. Нарисовать, куда будут действовать напряжение и ЭДС внутри источника. Убедиться в справедливости правил соотношения ЭДС и напряжения в контуре.
Рис. к задаче 3
4. Можно ли включать индуктивность на постоянное напряжение?
5. Можно ли включать емкость в цепь источника постоянного напряжения с помощью пружинных контактов реле?
6. Для чего в электромагнитном устройстве создается реактивный индуктивный ток? Каково отношение его фазы к фазе напряжения переменного синусоидального напряжения?
7. Какие изменения в электрической цепи создает реактивный индуктивный ток? Каково отношение его фазы к фазе напряжения переменного синусоидального напряжения?
8. Какие изменения в электромашинном устройстве и внешней среде вызывает активный ток? Каково отношение его фазы к фазе напряжения переменного синусоидального напряжения?
3. ОСНОВЫ ЭЛЕКТРОМЕХАНИКИ
Этот раздел посвящен решению различных практических задач судовой электромеханики на основе фундаментальных соотношений, полученных в разделе «ЭЛЕКТРИЧЕСТВО». Однако необходимо сосредоточить внимание не на решении задач, а на способе мышления при анализе всех возможных задач судовой электромеханики, на основе законов электрического, электромеханического и электромагнитного равновесия. Надо усвоить диалектическое мышление, которое является отражением реальной действительности. Если этого не добиться, то каждый электрический механизм на судне окажется предметом частного исследования в бесконечном многообразии ситуаций эксплуатационной практики. В конце раздела приводится ряд зачетных задач, которые сравнительно просто решаются, если рекомендованный способ мышления усвоен.
3.1. Дроссель
Рис. 30. Дроссель
Дроссель — это простейший вид электрооборудования. В состав дросселя входит замкнутый магнитопровод с зазором. На магнитопровод намотана электрическая обмотка. Здесь ничто не вращается, никакой работы это устройство не производит. В различных схемах дроссель служит для того, чтобы получить реактивный ток. Здесь же на примере дросселя будут рассмотрены важные для дальнейшего усвоения материала закономерности электромагнитного взаимодействия.
Поскольку механического момента нет, то остается только два из трех фундаментальных соотношений (электрическое и магнитное равновесие).
 ,
,
где
 ,
,
 .
.
Во-первых, из этих соотношений видно, что дроссель ни в коем случае нельзя включать в цепь источника постоянного напряжения, так как при этом относительная обобщенная скорость равна нулю, и магнитный поток должен при этом достичь бесконечности, а это значит, что ток также в пределе станет равен бесконечности.
Во-вторых, если нет зазора, то нет и тока. Зазор обязателен. Если его не видно, то это значит, что сталь магнитопровода специальными средствами делают не идеальной. То есть размывают зазор по всему сердечнику. Например, спекают порошок из размолотой стали с угольным порошком. Обычно же в зазор вводят стальную пластину, уменьшающую зазор, с помощью которой регулируется ток в сторону уменьшения (или увеличения при выдвижении пластины).
В-третьих, дроссель опасно включать в цепь с меньшей частотой. Действительно, при меньшей частоте и той же величине напряжения магнитный поток увеличится, и вполне вероятно, что сталь насытится. При этом магнитный поток частично станет замыкаться по воздуху, а это потребует резкого увеличения тока (необходимо привыкнуть к тому, что ток будет таким, чтобы обеспечить равновесие ЭДС).
В-четвертых, дроссель, включенный в цепь переменного напряжения, представляет собой источник магнитного потока, который можно регулировать только изменением частоты или напряжения. При неизменном напряжении и неизменной частоте магнитный поток остается неизменным. В частности, если ввести внутрь сердечника шину с током, пусть, например, в 40 раз превышающим номинал, то в силу закона равновесия ЭДС в обмотке появится составляющая, которая скомпенсирует любой переменный ток, который, казалось бы, должен изменить магнитный поток. В частности, в нашем примере (с четырьмя витками) появится составляющая, в 10 раз превышающая номинальный ток, которая полностью скомпенсирует ток шины. Эта компенсация обязательно произойдет, чтобы не был нарушен закон равновесия ЭДС. Этот ток шины может иметь другую частоту. Соответственно, в обмотке появится ток этой другой частоты. Итак, природа электричества такова, что закон равновесия ЭДС и вытекающее из него постоянство параметров магнитного потока являются ключом к пониманию взаимоиндукции. Это положение объяснит в дальнейшем разнообразные проявления взаимной зависимости токов в электрических машинах и других устройствах.
В-пятых, при всех этих рассуждениях мы ни разу не употребили слова «реактивное сопротивление». Это мы не будем делать и в дальнейшем, потому что закон равновесия ЭДС позволяет вникнуть вглубь электромагнитных взаимодействий, что и требуется в судовой практике.
 Рис. 31. Трансформатор напряжения
Рис. 31. Трансформатор напряжения
Устройство этого электрооборудования видно из рисунка.
Рассмотрим работу этого устройства только в том отношении, которое характерно для практики судового использования (не будем рассматривать подробно переходные процессы включения, емкость между проводниками обмоток, рассеяние и другие стороны работы). Нам важно уяснить, как и почему происходит взаимодействие первичной (слева) и вторичной стороны (справа) трансформатора, чтобы от простого перейти к более сложному представлению этого взаимодействия во вращающихся электрических механизмах. Кроме того, уясним важные для практики условия, которые необходимо соблюдать при конструировании схем и монтаже на судне.
Во-первых, трансформаторный сердечник делается из качественной трансформаторной стали, сердечник не имеет зазоров. Поэтому ток холостого хода равен нулю.
Во-вторых, трансформаторы имеют условную «полярность», которую надо обязательно соблюдать. Начала обмоток обычно обозначают звездочкой или описывают в паспорте или описании. Несоблюдение «полярности» сейчас, когда практически каждая система автоматики содержит множество измерительных и преобразующих трансформаторов, чревато тяжелыми аварийными последствиями. Обычно ориентация контуров магнитных потоков и токов имеет векторное изображение так, что из конца вектора направление контура видно против движения часовой стрелки. На рис. 31 контур магнитного потока направлен против движения часовой стрелки, то есть вектор магнитного потока направлен на нас. Контуры витков имеют направленность такую, что если пустить в положительном направлении (от звездочки) мысленно постоянный ток (ни в коем случае не реально), то этот ток создаст магнитный поток по направлению основного магнитного потока в сердечнике. Направление магнитного потока обычно определяют по известному правилу «буравчика». Обозначенные звездочками начала обмоток и присоединяемых приборов должны соединяться проводниками. На рис. 31 все эти условности выдержаны. На этом рисунке в кружочках на белом фоне поставлены плюсы и точки, относящиеся только к условно положительным направлениям в витках.
Рассмотрим работу трансформатора напряжения без нагрузки, то есть когда цепь вторичной обмотки отключена. К первичной обмотке приложено напряжение от источника ЭДС. Напряжение в первичной обмотке трансформатора уравновешивается ЭДС, то есть равно противоэдс.
,
где
 .
.
Для вторичной обмотки номинальное напряжение увеличено на коэффициент трансформации напряжения (судя по рисунку, где на первичной стороне изображено 4 витка, на вторичной стороне 6 витков, KU=1,5). Поэтому соотношения для вторичной обмотки будут те же. Действительно, если напряжение на первичной стороне увеличить в 2 раза (в относительных единицах u=2), то и на вторичной стороне оно увеличится в два раза (в относительных единицах u=2). Допустим, имеем трансформатор 100 В/ 150 В.
Увеличим напряжение в 2 раза — 200 В, u1=2, но и на вторичной стороне оно станет 300 В, u2=300/150=2. То есть с точки зрения моделирования в относительных единицах трансформатор исключается из модели. Это во многих случаях упрощает рассуждения (все, что изменяется пропорционально, то в относительных единицах равно). Итак, если параметры первичной стороны — номинальные, то и параметры вторичной стороны будут также номинальные. Все, в том числе и магнитный поток, будут равны единице. Реактивный ток будет равен нулю, поскольку зазора в магнитной системе нет.
Далее рассмотрим подключение некоего механизма на холостом ходу к вторичной обмотке. Механизм предполагает наличие статора и вращающегося ротора. Между статором и ротором, конечно, будет зазор, поэтому сразу же появится реактивный ток во вторичной обмотке. Казалось бы, этот ток создаст свой магнитный поток. Но изменение магнитного потока нарушит равенство напряжения и противоэдс, чего природа «не допустит». В первичной обмотке пойдет ток, полностью компенсирующий действие реактивного тока вторичной обмотки. Он будет также реактивный по отношению к напряжению на первичной стороне. С разницей лишь в том, что будет иметь противоположное действие. Если на вторичной стороне ток намагничивает электромеханизм, создавая магнитный поток, то на первичной стороне размагничивает источник ЭДС, требуя регулировки напряжения, чтобы электрический механизм первичной стороны остался источником в понимании, определенном ранее. То есть требуется некое «А» для поддержания свойств источника, например, регулятор напряжения. Наглядно это будет показано позже, когда займемся вращающимися электрическими механизмами.
Рис. 32. Трансформатор с нагрузкой
Пусть механизм вторичной стороны нагрузили тормозным механическим моментом:
 .
.
Это соотношение механического тормозного и электромагнитного движительного момента. Во вторичной цепи появится активный ток. Казалось бы, он должен создать свой магнитный поток, который сложится с магнитным потоком трансформатора, но этого в силу закона равновесия ЭДС быть не может. Поэтому в первичной обмотке также появится ток, полностью компенсирующий ток вторичной обмотки. Ток, умноженный на число витков, называют «магнитодвижущей силой (МДС)». Это «сила» только по названию. Она ничего общего с механической силой не имеет. То есть МДС первичной стороны равна МДС вторичной стороны, а сумма МДС в сердечнике будет равна нулю:
I1 *W1= I2 *W2 или I1 *W1+(- I2 *W2)=0.
|
|
|
|
|


|
|
|
|
|
|
|
|











Рис. 33. Правило рассмотрения контуров
Если проследить по направлению тока в контуре, то общей закономерностью будут следующие положения.
В левой части ток совпадает с направлением ЭДС (работа сторонних сил), значит, левая часть получает «работу» от внешнего источника работы, в правой части ток направлен против ЭДС, значит, правая часть отдает «работу» внешней среде. ЭДС левой части по отношению к направлению обхода контура равна напряжению правой части контура, а следовательно, равна и противоположна ЭДС правой части контура. ЭДС левой части контура равна и противоположна собственному напряжению. ЭДС правой части контура равна и противоположно направлена напряжению правой части контура. Напряжение левой части контура отрицательно, а напряжение правой части контура положительно, и при этом они по абсолютной величине равны. Все это не противоречит основному положению физики о потенциальности электрических полей, если рассматривают контур в Декартовых координатах X, Y и рассматривают пути от точки а к точке b, а также закону сохранения энергии (работы).
3.3. Трансформатор тока
Трансформатор тока — это такой же трансформатор, но включенный в цепь источника тока, рис. 34.
Рис. 34. Трансформатор тока
Так как ток первичной стороны не зависит от напряжения, а сумма наведенных МДС внутри сердечника должна быть равной нулю, то ток вторичной стороны подчиняется равенству I1 *W1= I2 *W2 и также не зависит от напряжения вторичной стороны. Поэтому трансформатор тока по отношению к цепям вторичной стороны также является источником тока. Если замкнуть накоротко контакты вторичной стороны трансформатора, то ток останется неизменным. Поэтому в цепи источника тока предохранители никогда не ставятся. Более того, разрыв вторичной цепи трансформатора тока ведет к резкому повышению магнитного потока. Вследствие чего переключать вторичные цепи надо без разрыва цепи, применяя специальные коммутирующие устройства. Если бы цепь вторичной стороны оставалась короткозамкнутой, то 0=u=e=ϕ*v.
Частота тока остается прежней, поэтому магнитный поток должен быть равным нулю, и в принципе стальной магнитопровод не требуется. Однако обычно напряжение вторичной цепи зависит от проходящего через нее тока. Тогда в катушках первичной и вторичной стороны должен иметь место синусоидальный магнитный поток ϕ, и для его проведения требуется стальной сердечник. Площадь этого сердечника должна быть такой, чтобы сталь оставалась ненасыщенной. Поэтому появляется еще одна характеристика трансформаторов тока, так называемая «Вольтамперная характеристика». Присоединенный к вторичной стороне прибор должен иметь «Вольтамперную характеристику» не выше этой же характеристики трансформатора тока.
«Вольтамперная характеристика» обязательно указывается в паспорте трансформатора тока. Если к трансформатору тока присоединяется, например, реле тока, то надо согласовать их «Вольтамперные характеристики».
Среди многочисленных трансформаторов тока промышленностью выпускаются в большом количестве измерительные трансформаторы тока, первичной стороной которых является просто шина, на которую они крепятся. Цепь измерительных приборов должна быть согласована с «Вольтамперной характеристикой» трансформатора тока, а присоединение должно соответствовать началам, указанным звездочкой или каким-либо другим способом.
На этом вводная часть заканчивается. Далее следует рассмотрение различных электрических механизмов в плане обучения применению, выведенных во втором разделе курса, фундаментальных соотношений электричества к судовым электродвигателям в судовой электроэнергетической системе. То есть собственно к электромеханике. Основой всех дальнейших рассуждений будут следующие предложения: «Приложенное напряжение всегда уравновешивается (равно противоэдс) ЭДС, которая образуется от взаимодействия магнитного потока и скорости, при неизменной скорости магнитный поток неизменен, а все наведенные (прочие) магнитодвижущие будут обязательно скомпенсированы. Токи в механизмах образуют в генераторах обратное действие согласно с правилом рассмотрения контуров».
3.4. Синхронный генератор и асинхронный двигатель
Система «Синхронный генератор и асинхронный двигатель», см. рис. 35.
Рис. 35. Синхронный генератор и асинхронный двигатель
на холостом ходу
Слева нарисован образ синхронного генератора, справа — асинхронного двигателя лебедки, поднимающей ящик с грузом. На этом рисунке ящик пустой, то есть двигатель работает на холостом ходу. Лебедка выбрана в качестве изображения источника постоянного момента (компрессор, якорный шпиль, брашпиль, момент этих и им подобных механизмов не зависит от частоты вращения). Вместо лебедки может быть гребной винт, вентилятор или циркуляционный насос, тогда момент будет зависеть от квадрата частоты вращения. В этом случае говорят, что потребитель имеет вентиляторную характеристику. Синхронный генератор —полнополюсный, чтобы не отвлекаться от главных процессов в системе. Все распределения магнитных потоков и токов считаются синусоидальными по окружности статора, что достигается специальными конструктивными методами (сокращение шага секции относительно полюсного шага, специальная форма полюсов ротора и др.).
Начнем с подробного описания процессов в асинхронном двигателе. К трехфазной обмотке, имеющей фазы А (окрашиваемой условно по правилам Российского Морского Регистра Судостроения — РМРС в желтый цвет, фазы В — в зеленый цвет, фазы С — в фиолетовый цвет). Для запоминания рекомендуется запомнить женское имя «Жозефина». На берегу фаза С окрашивается в красный цвет. Для запоминания рекомендуется запомнить более жесткое женское имя «Жозека». Фазы имеют начало, обозначенное буквой b (begin), и конец — e (end). Ротор асинхронного двигателя с короткозамкнутыми стержнями изображен внутри рисунка справа.
К статору асинхронного двигателя приложено трехфазное напряжение, которое в генераторе (слева) создается за счет вращения магнитного потока. Приводом вращения на рисунке изображен дизель. Напряжение уравновешивается ЭДС. Поэтому в статоре асинхронного двигателя должен образоваться вращающийся магнитный поток, а для его образования (поскольку имеется зазор между ротором и статором) должен пойти ток. Этот ток на рисунке асинхронного двигателя создает такой же, как и в генераторе, вращающийся магнитный поток (проверяется это с помощью правила «буравчика»). Справа по внешней окружности ток идет от нас, слева — к нам. Слева в генераторе этот ток будет обратного действия (согласно правилу рассмотрения контуров), он будет размагничивать ротор генератора. Справа ток генератора идет к нам, слева — от нас. Регулятор напряжения должен поддержать магнитный поток на прежнем уровне.
Ротор асинхронного двигателя «не должен» иметь ток, так как момент равен нулю. Следовательно, магнитный поток не должен пересекать стержни ротора. Поэтому ротор должен вращаться вместе с магнитным потоком, что и наблюдается на практике. В этом случае говорят о том, что ротор вращается с синхронной частотой вращения φr=φ.
Далее рассмотрим, что произойдет, если на валу электродвигателя создать момент — «загрузить ящик номинальным грузом», рис. 36.
Рис. 36. Синхронный генератор и асинхронный двигатель,
нагруженный постоянным тормозным моментом
Момент механический должен быть уравновешен моментом электромагнитным. Поэтому в роторе должен быть ток, который во взаимодействии с магнитным потоком создаст движущий момент «m». Следовательно, в роторе должен возникнуть ток. Причем для взаимодействия с магнитным потоком этот ток должен иметь поперечное направление и в верхней части ротора быть направлен на нас (проверяется с помощью правила левой руки). Ток в роторе должен быть таким, чтобы удовлетворялось соотношение равновесия моментов:
 .
.
Но чтобы этот ток имел место (при ограниченной проводимости стержней ротора асинхронного двигателя), в роторе должна образоваться ЭДС, а для этого ротор должен отстать от магнитного потока, чтобы магнитный поток скользил по ротору. Чем меньше проводимость меди стержней ротора, тем больше скольжение. Обычно при номинальном моменте скольжение равно 3%, то есть 1,5 герца. Но ток ротора, казалось бы, должен создать свой поперечный магнитный поток. Но этого, согласно принципу компенсации всех наведенных МДС, быть не может. Поэтому в статоре сразу же пойдет ток противоположного направления. Если сопоставить этот ток с напряжением, то он оказывается в фазе с напряжением сети. То есть это активный ток.
Активный ток пойдет в статор синхронного генератора с обратным направлением в верхней и нижней полуокружности. В верхней полуокружности ток пойдет «на нас», в нижней — «от нас». Но ток статора, казалось бы, должен создать свой поперечный магнитный поток вправо. Но этого, согласно принципу компенсации всех наведенных МДС, быть не может, так как должен остаться только магнитный поток, создающий противоэдс напряжению шин. Обратим внимание, что это напряжение шин А, В, С одинаковое как для синхронного генератора, так и для асинхронного двигателя. Значит, и магнитные потоки у них одинаковые. Чтобы компенсировать активный ток, статора ротор должен повернуться относительно магнитного потока на так называемый нагрузочный угол Ɵ.
Тогда появится МДС в поперечном направлении против МДС от активного тока статора. При этом на валу ротора синхронного генератора создастся момент, который будет действовать в другую сторону по отношению с направлением вращения. То есть активный ток статора создаст тормозной момент на валу дизеля. Благодаря регулятору частоты вращения дизеля он будет скомпенсирован движением рейки топливного насоса (как правило) внутрь корпуса топливного насоса высокого давления (ТНВД). Движение внутрь корпуса насоса сопровождается с увеличением подачи топлива на такт работы дизеля. Это и является причиной увеличения движущего момента на валу дизеля, приводящего к механическому равновесию. Когда наступит это равновесие, система генератор — двигатель перейдет в установившийся режим. Таким образом, положение рейки топливного насоса определяется моментом на валу асинхронного двигателя и не зависит от частоты вращения дизеля. Если двигателей много, то можно говорить о суммарном моменте потребителей.
Всю эту взаимосвязь необходимо «прочувствовать» на практических занятиях. Будем считать, что она усвоена, и это ускорит рассмотрение других систем.
3.5. Синхронный генератор и синхронный двигатель
Рис. 37. Синхронный генератор и синхронный двигатель на холостом ходе
На рис. 37 изображены две одинаковые синхронные машины. Разница только в том, что левая машина соединена с вращающим приводом — дизелем. Привод будем считать идеальным источником частоты вращения. Правая машина соединена с лебедкой, но в данном случае с пустым ящиком, то есть на холостом ходу.
Магнитный поток левой машины пересекает проводники статора, создавая ЭДС. ЭДС уравновешивается напряжением шин, которое должно, в свою очередь, уравновеситься ЭДС статора синхронного двигателя. Последнее может иметь место только в том случае, если ротор вращается с той же частотой и в фазе с магнитным потоком. Это и наблюдается на практике, когда синхронный двигатель включен в работу, то есть после синхронизации машин. Синхронизация машин рассматривается в других курсах. На холостом ходу никакого реактивного тока не требуется, так как обе машины в рабочем режиме создают одну и ту же ЭДС.
Нагрузим правую машину номинальным грузом и, следовательно, номинальным моментом (рис. 38).
Рис. 38. Синхронный генератор и синхронный двигатель,
нагруженный номинальным моментом
Тормозной момент лебедки должен быть обязательно уравновешен движущим моментом синхронной машины. Но чтобы образовался движущий момент, ротор «должен» повернуться относительно магнитного потока на нагрузочный угол Ɵ. Что и наблюдается. От поворота появится МДС ротора mdsR, действующая в правую сторону в поперечном направлении. В соответствии с принципом компенсации наведенных МДС появится компенсирующая статора mdsS, действующая в левую сторону в поперечном направлении. Для образования компенсирующей МДС статора пойдет ток, который, как видим, будет в фазе с ЭДС и противофазе с напряжением левой машины. Он вызовет ответную МДС ротора, что может иметь место, если ротор правой машины развернется влево от оси основного магнитного потока. Что и наблюдается на практике.
Повороты роторов относительно оси основного магнитного потока несколько уменьшат МДС роторов в продольной оси. От этого напряжение несколько уменьшится. Обычно угол Ɵ не более 0,2 радиан. Таким образом, напряжение уменьшится до Cos 0,2rad =0,98. То есть снизится на 2%. Это немного (меньше допустимой точности поддержания напряжения 3-5%). Если пожелать номинальное напряжение, то обычно поднимают токи возбуждения роторов двух машин так, чтобы реактивный ток оставался равным нулю.
Если токи возбуждения машин разные, то пойдет уравнительный ток, чтобы магнитные потоки были бы одинаковы. У той машины, где возбуждение больше, ток будет размагничивающий, индуктивный, соответственно, у другой машины ток будет намагничивающий, емкостной.
3.6. Частотные преобразователи, конверторы, векторное управление и вентильно-индукторные машины
Переворот в современной электромеханике совершили силовые транзисторы.
Силовой транзистор — это полупроводниковое управляемое быстродействующее устройство. В сочетании с микропроцессорным управлением получается преобразователь переменного тока сначала выпрямлением в постоянный ток, а затем, с помощью инвертора, снова в переменный ток разной частоты и напряжения (рис. 39).

Рис. 39. Структура преобразователя частоты
Кроме того, появилась возможность превратить преобразователь частоты в регулируемый источник тока. Преобразователь частоты — довольно сложное устройство. Теория, конструкция и эксплуатация частотного преобразователя рассматриваются в специальном курсе. Здесь же ограничимся только рассмотрением основных особенностей преобразования в двух случаях:
1. Преобразователь работает в режиме источника напряжения переменной частоты и величины напряжения.
2. Преобразователь работает в режиме источника тока, переменной частоты и величины тока.
В первом случае преобразователь обычно регулируется так, чтобы отношение напряжения к частоте было бы постоянным. Из условий электрического равновесия  имеем:
имеем:
Можно считать, что преобразователь частоты является источником магнитного потока. Но если магнитный поток асинхронного двигателя постоянен, то реактивный ток также будет постоянным (при постоянстве воздушного зазора), ток в роторе асинхронного двигателя будет пропорционален моменту на валу двигателя. Это хорошо для обычной эксплуатации подъемных механизмов, насосов и других механизмов подобного типа. В других случаях часто надо поднимать момент при малых скольжениях при пуске механизма, когда проявляются силы сухого трения. В таких случаях переходят на режим увеличения момента при низкой частоте. Замечательным свойством является то, что реактивный ток при этом «не вырабатывается», а «сопровождает» напряжение на выходе частотного преобразователя. Реактивный ток не чувствуется на первичной стороне частотного преобразователя, а генератор работает при косинусе фи, близком к единице. Напряжение на входе частотного преобразователя при этом незначительно уменьшается за счет поворота ротора синхронного генератора относительно статора на нагрузочный угол Ɵ. Как было показано выше, это уменьшение небольшое, порядка 2%.
Во втором случае, когда преобразователь работает в режиме источника тока разной частоты и величины, лучше употреблять более общее понятие «конвертор», что в переводе на русский язык и означает преобразователь.
Для второго случая рассмотрим физику так называемого векторного управления асинхронным двигателем, рис. 40.
На рис. 40 видим привычную уже картину разложения токов по продольной и поперечной оси. Но разница состоит в том, что здесь первичным является ток. Составляющая тока по продольной оси создает магнитный поток, вращающийся с заданной частотой φ относительно фаз статора. Меняя частоту вплоть до остановки магнитного потока, можно плавно изменять частоту вращения вала. Меняя ток по поперечной оси q, можно менять момент на валу даже при заторможенном состоянии, чтобы, например, не сломать винт судна в ледовой обстановке при встрече с большой льдиной.
Рис. 40. Структура асинхронного двигателя с векторным управлением
Здесь рассмотрена только физика векторного управления, пригодная для практического понимания процессов при указанном управлении на судне при уже готовой установке. Получение расчетных теоретических положений оставлено для изложения в специальных курсах. Процесс совершенствования рассмотренных выше традиционных типов электрических машин продолжается более ста пятидесяти лет. За это время были достигнуты значительные успехи. Однако требования, предъявляемые современными электромеханическими устройствами к электрическим машинам, продолжают расти, а резервы повышения их показателей и характеристик только за счет выше перечисленных инструментов в определенной степени исчерпаны. В определенном смысле регулируемый электропривод с традиционными электрическими машинами отражает эволюционный ход развития электромеханики.
Одним из качественно новых электромеханических преобразователей энергии является вентильно-индукторный двигатель (ВИД).
Бурное развитие ВИД началось примерно 30 лет назад. Вместе с тем следует отметить, что сама концепция этой электрической машины была сформулирована еще в конце тридцатых годов XIX века. Первый двигатель был создан Дэвидсоном и использовался на железной дороге Глазго–Эдинбург для приведения в движение локомотива массой несколько тонн. В силу несовершенства элементной базы (в первом ВИД использовался механический коммутатор) массового применения эти электрические машины в то время не нашли и о них забыли более чем на сто лет.
Вторая половина XX века характеризовалась, с одной стороны, стремительным развитием силовой и информационной электроники, а с другой — все возрастающими требованиями, предъявляемыми к электрическим машинам, которыми традиционным типам электромеханических преобразователей энергии становилось все труднее и труднее удовлетворять. Это создало предпосылки и обеспечило техническую базу для разработки и производства ВИД. В настоящее время многие крупнейшие электротехнические компании мира либо уже серийно производят эти электрические машины, либо готовятся к этому.
Несмотря на свою более чем вековую историю, ВИД представляет собой относительно новый тип электромеханического преобразователя энергии, в теории и практике которого еще много белых пятен. ВИД представляет собой систему, структурная схема которой приведена на рис. 41.
Рис. 41. Структурная схема ВИД
В ее состав входят: электромашина (ЭМ), преобразователь частоты (ПЧ), система управления (СУ), нагрузка и датчик положения ротора (ДПР). Функциональное назначение этих элементов ВИД очевидно: преобразователь частоты обеспечивает питание фаз ЭМ однополярными импульсами напряжения прямоугольной формы; ЭМ осуществляет электромеханическое преобразование электрической мощности; система управления в соответствии с заложенным в нее алгоритмом и сигналами обратной связи, поступающими от датчика положения ротора, управляет данным процессом.
По своей структуре ВИД ничем не отличается от классической системы регулируемого электропривода. Именно поэтому он и обладает всеми ее свойствами. Однако, в отличие от регулируемого электропривода, например, с асинхронным двигателем, электромашина в ВИД не является самодостаточной. Она принципиально не способна работать без преобразователя частоты и системы управления.
Электромашина, входящая в состав ВИД, может иметь различные конструктивные исполнения. На рис. 42, для примера, приведено поперечное сечение 4-фазной ЭМ конфигурации 8/6. При обозначении конфигурации ЭМ первая цифра указывает число полюсов статора,
вторая — ротора.
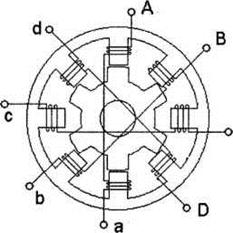
Рис. 42. Поперечное сечение 4-фазной ЭМ конфигурации 8/6
Анализ рис. 42. показывает, что ЭМ имеет следующие конструктивные особенности.
Сердечники статора и ротора имеют явнополюсную структуру.
Число полюсов относительно невелико. При этом число полюсов статора больше числа полюсов ротора.
Сердечники статора и ротора выполняются шихтованными.
Обмотка статора - сосредоточенная катушечная.
Фаза ЭМ, как правило, состоит из двух катушек, расположенных на диаметрально противоположных полюсах статора.
Обмотка на роторе ЭМ отсутствует. Такие машины носят название индукторных машин. Отсюда и название «Вентильно-индукторная машина».
В последнее время в мире наблюдается устойчивая тенденция выполнения преобразователя частоты и двигателя в системе регулируемого электропривода в одном корпусе. Такое конструктивное исполнение может быть названо как электропривод интегрального исполнения.
Принцип действия рассмотрим на примере той же машины 8/6 полюсов.

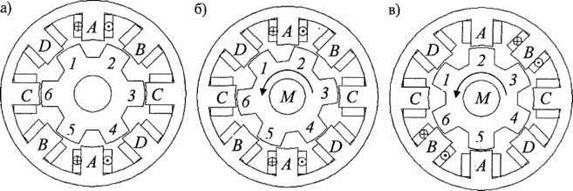
Рис. 43. К пояснению принципа действия ВИД:
а — рассогласованное положение сердечников для фазы А;
б — промежуточное положение сердечников для фазы А;
в — согласованное положение сердечников для фазы А
Предположим, что в положении а по сигналу системы управления произойдет коммутация ключей преобразователя частоты и к фазе А будет приложено постоянное напряжение Ua, тогда по катушкам фазы потечет ток Iа, который создаст МДС Fa-. Эта МДС, в свою очередь, возбудит в машине магнитное поле.
В магнитном поле фазы А ротор будет стремиться ориентироваться таким образом, чтобы магнитный поток, пронизывающий его, принял максимальное значение. При этом на сердечники статора и ротора будут действовать одинаковые по значению и обратные по направлению электромагнитные силы (ЭМС) тяжения. Рассогласованное положение представляет собой точку неустойчивого равновесия. Действительно, если под действием какого-либо внешнего воздействия ротор отклонится от рассогласованного положения в том или ином направлении, то равнодействующая азимутальных составляющих ЭМС сердечников уже не будет равна нулю. Следовательно, возникнет вращающий момент, который будет стремиться повернуть ротор в направлении от рассогласованного положения.
Возьмем другое положение ротора, показанное на рис. 43 б. Здесь фаза А имеет большее потокосцепление и индуктивность, чем в рассогласованном положении, что объясняется меньшей величиной зазора между сердечниками. При этом равнодействующая азимутальных составляющих ЭМС сердечников отлична от нуля, и созданный ею электромагнитный момент стремится повернуть ротор ЭМ против часовой стрелки.
Вращение ротора будет продолжаться до тех пор, пока он не займет положение, показанное на рис. 43 в. Оно называется согласованным положением фазы В.
Согласованным положением сердечников статора и ротора ЭМ для какой-либо фазы называется такое положение, при котором ось каждой катушки этой фазы совпадает с одной из осей ротора, т.е. зубцы фазы располагаются строго напротив полюсов ротора. Это положение характеризуется максимальным значением индуктивности фазы и сцепленного с ней магнитного потока, что объясняется минимальной величиной магнитного сопротивления зазора между сердечниками.
В этом положении ЭМС притяжения сердечников имеют только радиальные составляющие. В силу чего вращающий момент ЭМ в этом положении равен нулю.
Согласованное положение представляет собой точку устойчивого равновесия. Действительно, если под действием какой-либо внешней силы ротор отклонится от согласованного положения в ту или иную сторону, то возникший электромагнитный момент будет стремиться вернуть его в согласованное положение.
Для того чтобы продолжить однонаправленное вращение ротора, необходимо еще до достижения согласованного положения фазы А осущест- вить коммутацию ключей преобразователя частоты, в результате которой фаза А должна быть отсоединена от источника питания, а фаза, момент которой стремится продолжить вращение ротора в прежнем направлении, подключена к нему. В данном случае это фаза В.
Взаимное положение сердечников статора и ротора, близкое к согласованному положению для фазы А, является для фазы В близким к рассогласованному положению. То есть при подаче на нее напряжения и протекании по ее катушкам тока возникнет отличный от нуля вращающий момент, который будет стремиться повернуть ротор против часовой стрелки.
а б в
Рис. 44. Этапы коммутации фаз:
а — этап возбуждения; б — этап начального интенсивного гашения поля, в — этап полного гашения поля.
Жирными линиями выделены контуры протекания тока
при различных состояниях ключей S1 и S2 (точечный пунктир означает, что ключ разомкнут)
Необходимость коммутации фаз еще до достижения согласованного положения сердечников диктуется желанием получить как можно меньшее значение тока в отключаемой фазе при достижении ее согласованного положения. Дело в том, что после отключения фазы магнитное поле не может исчезнуть мгновенно. Работа электрической сети, затраченная на создание поля, должна быть израсходована (отдана обратно в сеть или выделиться в виде тепла). В силу этого в обмотке фазы возникает ЭДС самоиндукции, и ток фазы остается отличным от нуля еще некоторое время после ее коммутации. Он замыкается через встречно включенные диоды D1, D2 преобразователя частоты (учтем известное в электротехнике правило — «диод для обратного тока имеет бесконечную проводимость для обратного тока не более тока текущего в прямом направлении и «внутреннее сопротивление источника ЭДС равно нулю») и питающую сеть (рис. 44 б). В конечном итоге ток достигнет нулевого значения (работа магнитного поля выделится в виде электрических потерь на активных сопротивлениях фазы, встречно включенных диодов, обозначено в совокупности R). Однако если этот ток будет отличен от нуля в согласованном положении фазы, то при дальнейшем вращении ротора созданное им магнитное поле приведет к возникновению тормозного электромагнитного момента. Поэтому в конце цикла коммутации открывается ключ S2, и фаза оказывается в замкнутом контуре (рис. 6 в).
Фаза В будет находиться под напряжением до тех пор, пока ротор не достигнет положения, близкого к согласованному. При достижении этого положения от ДПР в систему управления поступит соответствующий сигнал, обработка которого приведет к выдаче управляющего воздействия на преобразователь частоты и переключению фаз В и С. Цикл повторится.
Таким образом, проводя последовательную коммутацию фаз, можно осуществить однонаправленное вращение ротора.
ПРИЛОЖЕНИЯ
Приложение 1. Идеальная линейная машина
Идеальной линейной машиной назовем проводник в плоскопараллельном магнитном потоке Ф. Проводник присоединяется либо к источнику напряжения, либо к источнику тока. Проводник связан с этими источниками гибкими проводами. Примем направление проводника «к нам», что обозначено жирной точкой на рисунке. Таким образом, направление обхода контура будет таким, как показано стрелками. Проводник имеет массу М, то есть представляет собой инерционную среду по отношению к току проводника. Проводник движется в вязкой или упругой среде. Рассмотрим типовые задачи, от которых надо перейти к произвольно поставленным задачам.
Рис. П1. Образ идеальной линейной машины
Задача: Проводник соединили с источником тока I. BLI>Mg. Какое установившееся положение займет проводник?
Ответ: По правилу левой руки появится сила, направленная вверх от земли. Сила, создаваемая током, постоянна и равна BLI. В установившемся режиме эта сила может быть уравновешена силой тяжести и силой пружины. Поэтому пружина растянется на величину (BLI-Mg)/C, и далее система успокоится. Поэтому силы вязкого трения будут отсутствовать.
Задача: При тех же условиях оторвали пружину от основания (земли). Каково будет установившееся движение системы?
Ответ: В новых условиях избыток силы BLI-Mg может быть уравновешен за счет вязкости среды. Поэтому провод начнет двигаться вверх со скоростью V= (BLI-Mg)/K. При этом напряжение источника тока будет постоянно и равно U= BLV.
Задача: При тех же условиях откачали вязкую среду. Как будет двигаться провод?
Ответ: В новых условиях уравновесить разность сил можно только за счет сил инерции. Поэтому провод будет двигаться с ускорением вверх
(BLI-Mg)/M. При этом напряжение источника тока будет все время увеличиваться по мере увеличения скорости и равно U= BLV. V=((BLI-Mg)/M)•(t/2).
Задача: В указанной вначале задаче поменяли источник тока на источник напряжения U. Как будет двигаться провод в установившемся режиме? Какой будет ток при этом?
Ответ: Коль скоро приложено напряжение, оно должно быть скомпенсировано противоэдс. Напряжение при указанном стрелками направлении приложено на нас. Следовательно, противоэдс будет действовать от нас. По правилу правой руки эту противоэдс может вызвать только равномерная скорость вверх. Поэтому провод и будет двигаться со скоростью, определяемой уравнением U= E=BLV. Но чтобы обеспечить эту скорость, ток должен быть таким, чтобы скомпенсировать силу тяжести, пружины и силы вязкости. BLI=Mg + KV + CV*t. Ускорения в этом случае нет (по условию задачи режим установившийся), поэтому инерционные силы отсутствуют. Разделим правую и левую части уравнения на BL. Получим: I=(Mg + KV)/BL + (CV/BL)*t
График тока должен быть таким:
Рис. П2. График тока
Исходя из этого, на основе третьего закона Ньютона и закона равновесия ЭДС при постоянстве B и L, можно написать следующие фундаментальные соотношения для абсолютных величин без учета направления действия:
F e= F m= ф·i (1)
u=e=ф·v (2)








