 2015-03-20
2015-03-20 2686
2686Корректирующие устройства предназначены для обеспечения устойчивости в системах электроавтоматики и получения высоких качественных показателей процессов управления. Если система не обладает необходимыми динамическими свойствами, то изменяют ее структуру, вводя корректирующие элементы и выбирая их параметры.
В зависимости от схемы включения КУ их делят на последовательные и параллельные. В первом случае КУ включают последовательно в цепь основного воздействия, а во втором – в цепь обратной связи, охватывающей одно или несколько звеньев системы. Возможно комбинированное включение последовательных и параллельных КУ.
Сигналы на выходе корректирующих устройств представляют собой производные или интегралы во времени от вх. Сигналов управления (напряжения, частоты вращения, угла поворота вала двигателя и др.) Поэтому основным видом корректирующих устройств являются дифференцирующие, интегрирующие и интегродифференцирующие устройства. Возможны также и различные сочетания видов коррекции.
Основная классификация КУ - по использованию вспомогательной энергии: пассивные и активные.
Пассивные КУ.
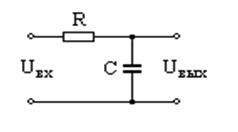 Не требуют вспомогательного источника тока и выполняются на R,C – элементах (резисторах, конденсаторах).
Не требуют вспомогательного источника тока и выполняются на R,C – элементах (резисторах, конденсаторах).
А).  (1);
(1);
 (2).
(2).
Продифференцировав последнее выражение, получим  (3).
(3).
Подставив выражения (2) и (3) в (1) имеем  .
.
Или  , где T = RC – постоянная времени интегрирования.
, где T = RC – постоянная времени интегрирования.
Воспользовавшись преобразованием Лапласса, приводим это выражение к оператор-
ному виду  ,
,
Откуда передаточная функция  .
.
Следовательно данное устройство реализует инерционное звено первого порядка.
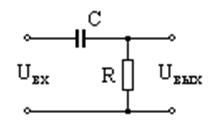
Б).  (1);
(1);
 (2). Откуда
(2). Откуда  (3).
(3).
Подставив (2) и (3) в выражение (1), получим
 (3).
(3).
Проинтегрировав его имеем  .
.
Или  , где T = RC – постоянная времени интегрирования.
, где T = RC – постоянная времени интегрирования.
Воспользовавшись преобразованием Лапласса, получим
 .
.
Тогда передаточная функция примет следующий вид  .
.
Следовательно данное устройство реализует дифференцирующее реальное звено.
Активные КУ.
В качестве этих устройств используются элементы, реализующиеся на операционных усилителях (например, на транзисторных) и требуют вспомогательного источника питания.
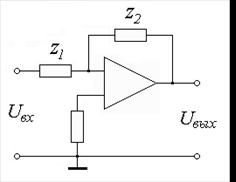 Активное корректирующее устройство содержит операционный усилитель постоянного тока (с коэффициентом усиления k) и операционные сопротивления во входной цепи z1(s) и в цепи обратной связи z2(s).
Активное корректирующее устройство содержит операционный усилитель постоянного тока (с коэффициентом усиления k) и операционные сопротивления во входной цепи z1(s) и в цепи обратной связи z2(s).
Передаточная функция данного устройства определится следующим выражением
Т.к. коэффициент усиления достаточно велик (104 ¸106), то данную формулу
можно представить в таком виде  .
.
Операторные сопротивления z1(s) и z2(s) можно подобрать с высокой точностью и т.о. реализовать передаточную функцию.
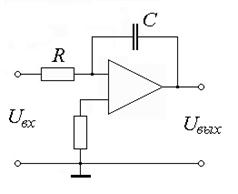
Здесь z1(s) ® R и z2(s) ® C.
Тогда 
или  ,
,
где Ти = RC – постоянная времени интегрирования, а вся функция представляет собой интегрирующее звено.
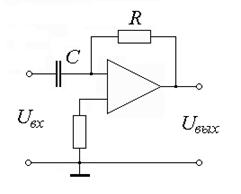 Если z1(s) ® C и z2(s) ® R.
Если z1(s) ® C и z2(s) ® R.
Тогда 
или  ,
,
где Тд = RC – постоянная времени дифференцирования, а вся функция представляет собой дифференцирующее звено.
Т.о., используя различные сочетания подключения конденсаторов и резисторов в цепь операционного усилителя, можно получить и другие динамические звенья.








