 2015-04-17
2015-04-17 546
546Решение любых задач в человеческой деятельности прямо или косвенно связано с оценкой эффективности полученного результата с точки зрения поставленных целей. В простейшем случае такая оценка сводится к качественным понятиям "хорошо" или "плохо". Однако при подобном подходе возможны проявления субъективизма: что хорошо одному - может показаться плохо другому. Вместе с тем качественные характеристики не дают ответа на вопросы "насколько хорошо?" или "насколько плохо?".
Количественные характеристики привносят в наши представления об объекте исследования строгость и основательность, служат основой для целенаправленного улучшения качества работы систем.
Решение технических задач связано с оперированием количественными значениями параметров объектов, а также количественными характеристиками параметров рабочих процессов, осуществляемых данными объектами.
Численные показатели позволяют строго охарактеризовать различие объектов и процессов на основе количественного различия их параметров.
Рассмотрим количественные характеристики систем управления с обратной связью.
Открытие закона функционирования систем управления - закона обратной связи - дало возможность целенаправленно вести проектирование АСР, зная основные необходимые элементы и порядок их связи в системах.
Известно, что использование обратной связи при управлении объектом позволяет учитывать сведения не только о желаемом, но и о действительном ходе рабочего процесса. С помощью обратной связи удается, не вдаваясь в детали причин, вызывающих отклонение регулируемой величины, корректировать ее значение на основании лишь информации об этих отклонениях за счет определенным образом формируемого управляющего воздействия на объект управления. Чем лучше система справляется с задачей поддержания строгого соответствия между задающим воздействием и регулируемой величиной, т.е. чем меньше ошибка регулирования, тем совершеннее система.
Причины, вызывающие отклонения регулируемой величины, могут быть различны. Однако можно выделить несколько основных источников ошибок регулирования.
1. Внешние возмущения - возмущения по нагрузке и по питанию.
Под "нагрузкой" понимается "потребитель" конечного результата работы объекта управления. Так, у двигателя, используемого для вращения шпинделя станка, нагрузкой является обрабатываемая деталь. Параметром нагрузки, характеризующим ее влияние на процесс регулирования скорости вращения, является усилие резания.
У бака, используемого для нагревания в нем жидкости, нагрузкой является агрегат, потребляющей эту нагретую жидкость в своем технологическом процессе. Параметром нагрузки в данном случае может быть расход жидкости, меняющийся при изменении производительности агрегата.
Под "питанием" понимается энергия, используемая системой для осуществления операций регулирования. В зависимости от физического носителя параметром питания может быть величина напряжения, сила тока, давление сжатого воздуха и т.п.
На производстве один и тот же источник энергии используется в большинстве случаев рядом потребителей (станками, агрегатами, цехами), производительность, а следовательно и потребление энергии которых может меняться в производственном цикле. Вместе с тем любой реальный источник энергии обладает конечной мощностью. Отсюда изменения в потреблении энергии одним из агрегатов в большей или меньшей мере сказывается на изменении параметров носителя энергии: изменяется величина, напряжения в сети, меняется давление сжатого воздуха в пневмолиниях и т.п.
2. Внутренние возмущения как источники ошибки регулирования
обусловлены изменениями параметров элементов систем из-за изменений условий окружающей среды (температуры, давления, влажности, вибрации), старения элементов и т.п.
3. Ошибка чувствительного элемента как измерительного органа системы связана с конструктивными особенностями и неизбежными погрешностями при его изготовлении. Ошибку чувствительного элемента можно рассматривать как некоторое возмущающее воздействие на систему.
4. Инерционность элементов и систем также является причиной так называемой динамической ошибки регулирования, присутствующей в системах из-за задержки изменения регулируемой величины на изменение управлявшего или задающего воздействия. Такая ошибка всегда свойственна системам в переходных процессах.
Таким образом ошибка регулирования зависит не только от действующих на систему сигналов, но и от собственных ее свойств, зависящих от параметров элементов системы. Так как исполнительный и регулирующий орган выбираются из энергетических соображений, чувствительный элемент из соображений требуемой точности измерений, а преобразующее устройства из соображений, например, безопасности оперирования с сигналами, то параметры этих элементов как и параметры объекта регулирования, в большинстве случаев изменениям не подлежат.
Регулятор как устройство, реализующее определенный закон регулирования, является тем звеном системы, параметры которого (насторойки регулятора) можно изменять.
Получение ошибки регулирования не более требуемого значения при проектировании системы сводится в простейшем случае к выбору закона регулирования и его коэффициентов (настроек регулятора), обеспечивающих заданное изменение регулируемой величины при действии на систему возмущения.
Рассмотрим количественные характеристики систем с обратной связью для того, чтобы объективно определить цену ее использования.
19.1. Чувствительность АСР к вариациям параметров
их элементов
В разомкнутой системе все изменения параметров элементов и действующие возмущения непосредственно оказываются на изменениях выходной величины.
Отличие системы с обратной связью заключается в том, что такая система "чувствует" подобные изменения по изменению выходной величины и пытается скорректировать регулируемую величину. Именно “чувствительность” АСР к указанным изменениям является ее важнейшей чертой.
Рассмотрим системы без и с обратной связью (рис. 1.9.1)
а б

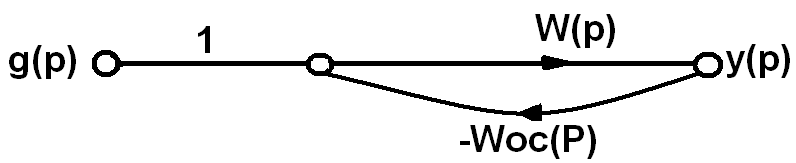
Рис. 19.1. Графы: а - разомкнутой и б - замкнутой систем
Для системы без обратной связи имеем
 . (19.1)
. (19.1)
Для системы с обратной связью
 . (19.2)
. (19.2)
Если для замкнутой системы в области рабочих частот  что, как увидим в дальнейшем, всегда выполняется, то из уравнения(19.2) можно записать:
что, как увидим в дальнейшем, всегда выполняется, то из уравнения(19.2) можно записать:
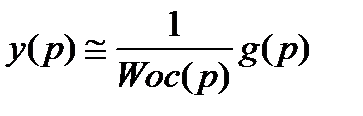 . (19.3)
. (19.3)
Из уравнения (19.3) следует, что влияние параметров W(р) и их изменений можно рассматривать как несущественное. А при Wос(p)=1 получаем желаемый результат, когда выход равен входу.
Поэтому первая польза от введения обратной связи заключается в уменьшении влияния изменения параметров объекта регулирования.
Для более детальной иллюстрации отмеченных положений рассмотрим изменение параметров W(р). Пусть при этом будем иметь 
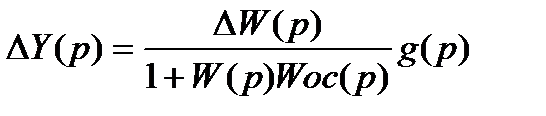
Тогда в случае замкнутой системы получим.
 . (19.4)
. (19.4)
Для системы без обратной связи
 . (19.5)
. (19.5)
из (19.4) следует
 . (19.6)
. (19.6)
В случае  имеем
имеем

 . (19.7)
. (19.7)
Сравнивал (19.5) и (19.7) можно заметить, что  во втором случае уменьшается на величину
во втором случае уменьшается на величину  .
.
Введем количественную характеристику, которая позволила бы сравнивать системы по тому влиянию, которое оказывает на их работу изменение параметров элементов.
Такая характеристика носит название чувствительности и представляет собой процентное изменение передаточной функции системы к процентному изменению передаточной функции процесса:
 . (19.8)
. (19.8)
В пределе для малых изменений (19.8) можно переписать
 (19.9)
(19.9)
Для системы без обратной связи, как следует из (19.5), S=1.
Для системы с обратной связью имеем
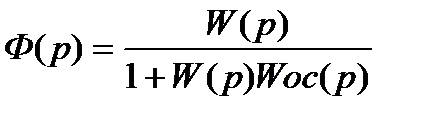 (19.10)
(19.10)
Далее
S= 
 =
= 
 . (19.11)
. (19.11)
Находим, что чувствительность системы к изменению параметров может быть изменена по сравнению с системой без обратной связи за счёт увеличения W (p)·Wос (p).
Рассмотрим чувствительность системы к изменению параметров элементов в обратной связи. В данном случае
 (19.12)
(19.12)
При больших величинах W Wос чувствительность  приближается к единице и изменения в Wос (p) непосредственно сказываются на изменении выходной величины.
приближается к единице и изменения в Wос (p) непосредственно сказываются на изменении выходной величины.
Анализируя полученные результаты, сделаем важные для практики проектирования систем выводы.
Для получения высокой точности в системах без обратной связи элементы системы должны быть тщательно выбраны и изготовлены с большой точностью. В то же время для систем с обратной связью допустима меньшая точность исполнения основных элементов. Отсюда меньше производственные затраты и стоимость их изготовления. Однако особое внимание должно быть уделено элементам в обратной связи (чувствительному элементу, преобразователю). Этим во многом объясняются относительно большие усилия и материальные затраты, направленные на стабилизацию параметров измерительных приборов.








