 2015-04-01
2015-04-01 1388
13881.1.1. Основные понятия и определения
Элементы, из которых состоят механизмы, называются звеньями. Звено, принятое за неподвижное, называется стойкой. Звенья, положения которых назначаются непосредственно значением выбранных независимых параметров (обобщенных координат), называются ведущими, а звенья, положения которых зависят от положений ведущих звеньев, называются ведомыми.
Звенья в механизмах соединяются между собой подвижно. Подвижное соединение двух соприкасающихся звеньев, называется кинематической парой. В сборнике принята классификация по методу И. И. Артоболевского. Все кинематические пары разделяются на пять классов. Номер класса определяется числом условий связи, которые наложены на движение одного звена относительно другого. Значит, пара первого класса имеет одно ограничение движения и может быть названа пятиподвижной; пара второго класса – четырехподвижная и так далее. При определении класса кинематической пары следует установить, какие из шести возможных движений (трех вращательных и трех поступательных) одного звена относительно другого оказываются связанными и какие свободными, в соответствии с этим и определяется класс заданной пары.
Рассмотрим примеры.
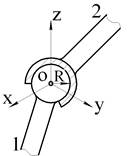 Рис. 1.1. Сферическая кинематическая пара Рис. 1.1. Сферическая кинематическая пара | 1. На рис. 1.1 изображена низшая сферическая кинематическая пара. Элементом кинематической пары на первом звене является сферическая поверхность радиуса R, а на втором звене – сферическая поверхность того же радиуса R, охватывающая первую. |
Проведем через центр сферы прямоугольную систему координат Oxyz, связанную со звеном 1. Звено 2 не может поступательно перемещаться вдоль осей Ox, Oy и Oz, но может вращаться вокруг этих осей. Здесь невозможны три движения из шести, значит, эту пару следует считать парой третьего класса.
2. Если на это соединение наложить еще два условия связи – невозможность вращения вокруг осей Oy и Oz, то есть звенья 1 и 2 совершают плоскопараллельное движение относительно плоскости Oyz, то эта пара становится парой пятого класса.
Предлагаются задачи, которые следует решить для закрепления материала.
ЗАДАЧИ 1 – 16
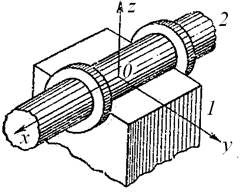
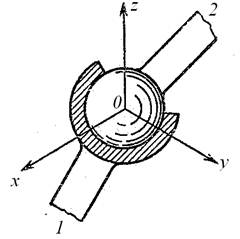
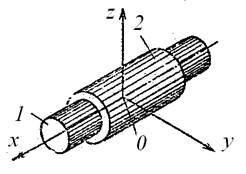
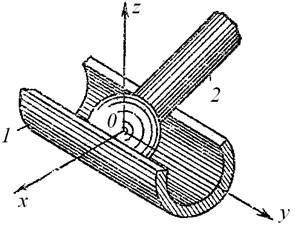
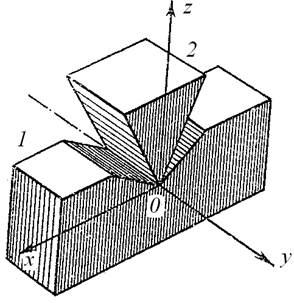
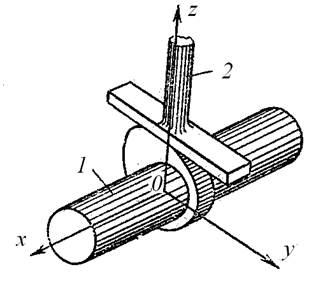
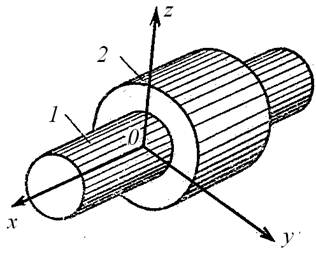
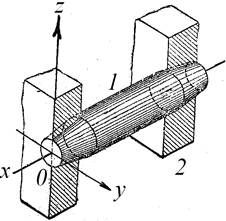
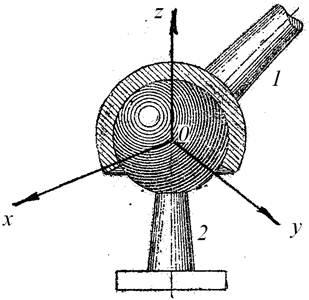
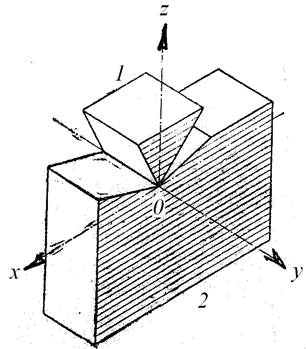
Определить класс кинематической пары, образованной звеньями 1 и 2. Пояснить, какие из шести независимых движений одного звена относительно другого невозможны в кинематической паре.
 К задаче 1 К задаче 1 | 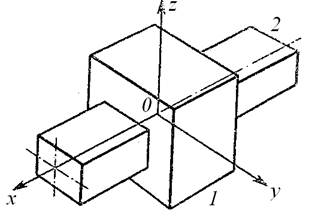 К задаче 2 К задаче 2 |
 К задаче 3 К задаче 3 | 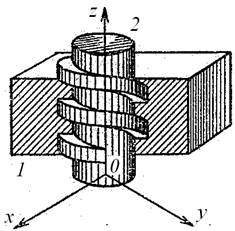 К задаче 4 К задаче 4 |
 К задаче 5 К задаче 5 | 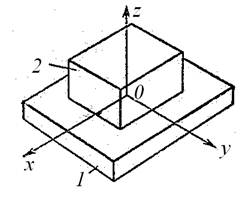 К задаче 6 К задаче 6 |
 К задаче 7 К задаче 7 | 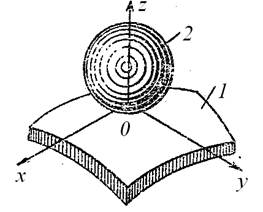 К задаче 8 К задаче 8 |
 К задаче 9 К задаче 9 | 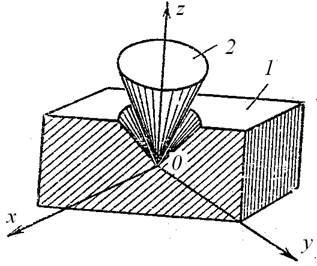 К задаче 10 К задаче 10 |
 К задаче 11 К задаче 11 | 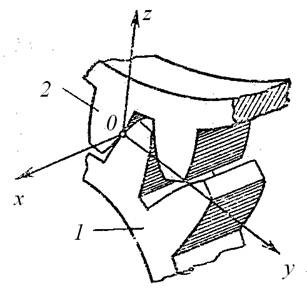 К задаче 12 К задаче 12 |
 К задаче 13 К задаче 13 | 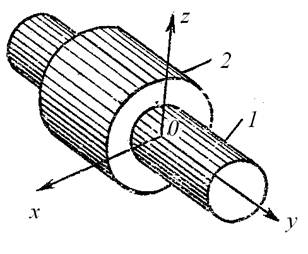 К задаче 14 К задаче 14 |
 К задаче 15 К задаче 15 | 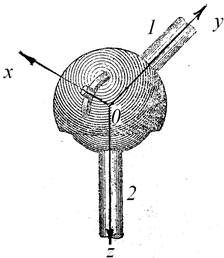 К задаче 16 К задаче 16 |
ЗАДАЧИ 17 – 20
Определить класс кинематической пары, образованной звеньями 1 и 2, если звенья могут двигаться только в плоскости xOz.
 К задаче 17 К задаче 17 | 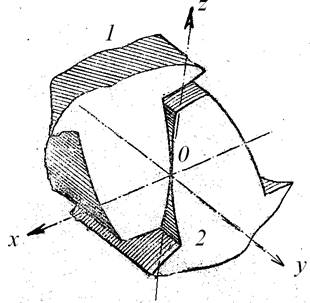 К задаче 18 К задаче 18 |
 К задаче 19 К задаче 19 | 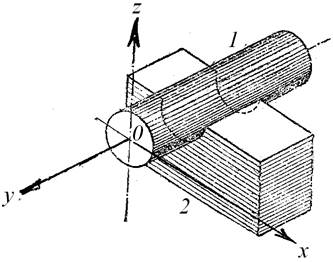 К задаче 20 К задаче 20 |
1.1.2. Кинематические цепи
Кинематической цепью называется связанная система звеньев, образующих между собой кинематические пары.
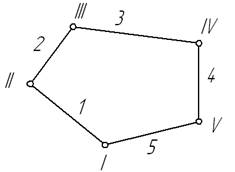
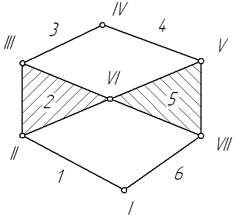
Кинематические цепи подразделяются на простые и сложные. Простой кинематической цепью называется такая, у которой каждое звено входит не более чем в две кинематические пары (рис. 1.2, 1.4, а). Сложной кинематической цепью называется цепь, в которой есть хотя бы одно звено, входящее более чем в две кинематические пары (рис. 1.3, 1.4, б).
Простые и сложные кинематические цепи делятся на замкнутые и незамкнутые. Замкнутой называется такая кинематическая цепь, у которой каждое звено входит, по крайней мере, в две кинематические пары (рис. 1.4). Незамкнутой называется такая кинематическая цепь, у которой есть звенья, входящие только в одну кинематическую пару (рис. 1.2, 1.3).
В механизмах применяются такие кинематические цепи, у которых одно звено неподвижно, то есть является стойкой. Таким образом, механизмом называется замкнутая кинематическая цепь, в которой при заданном движении одного или нескольких звеньев (ведущих) относительно неподвижного (стойки) все остальные звенья (ведомые) совершают однозначно определяемые движения.
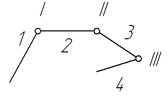
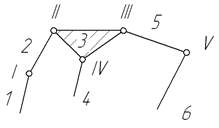
Рис. 1.2 Рис. 1.3
а б
Рис. 1.4
1.1.3. Степени подвижности плоских и пространственных механизмов
Если при движении звена в пространстве не накладываются ограничения движений (условия связи), то оно имеет шесть степеней свободы. Если число звеньев n, то общее число степеней свободы 6n. Кинематические пары разных классов накладывают разное число связей на относительное движение звеньев. Так, если р1 – число кинематических пар первого класса (одно ограничение движения), р2 – число пар второго класса (два ограничения движения) и так далее, то из общего числа степеней свободы 6n следует вычесть те степени свободы, которые отнимаются вхождением звеньев в кинематические пары, и получим число степеней свободы кинематической цепи Н:
Н = 6n – 5р5 – 4р4 – 3р3 – 2р2 – 1р1. (1.1)
При изучении движения всех звеньев механизма общее число степеней свободы W уменьшится на шесть, так как одно звено неподвижное:
W = Н – 6. (1.2)
Подставив в (1.2) вместо Н выражение (1.1) и заменив (n – 1) через k (число подвижных звеньев), получим:
W = 6k – 5p5 – 4p4 – 3p3 – 2p2 – 1p1. (1.3)
Равенство (1.3) называется степенью подвижности кинематической цепи общего вида. По нему определяется степень подвижности пространственных механизмов.
Если на движение всех звеньев механизма в целом наложено три общих ограничения, то число степеней свободы подвижных звеньев будет (6 – 3)k = 3k, пары пятого класса будут накладывать (5 – 3)р5 связей и так далее. Структурная формула (1.3) перепишется так:
W = (6 – 3)k – (5 – 3)p5 – (4 – 3)p4 – (3 – 3)p3,
то есть степень подвижности плоского механизма равна
W = 3k – 2p5 – 1p4. (1.4.)
В механизмах могут встретиться степени свободы и условия связи, не влияющие на характер движения механизма в целом. Они называются лишними степенями свободы и пассивными связями. Их применяют для придания механизму жесткости или для передачи движения на расстояние.
Прежде чем применять структурные формулы, следует установить, сколько общих условий связи наложено на движение звеньев механизма и нет ли звеньев, которые накладывают пассивные связи или вносят лишние степени свободы, но не влияют на кинематику основных звеньев механизма.
В примере на рис. 1.5 звено 5 не мешает работе механизма, но при подсчете подвижности по формуле (1.4) получаем:
W = 3k – 2р5 – 1р4 = 3×4 – 2×6 – 0 = 0.
При отброшенном звене 5 (оно относится к пассивным связям) W = 3×3 – 2×4 – 0 = 1. Это означает, что для работы механизма достаточно придать движение одному звену.
В примере на рис. 1.5 изображен кулачковый механизм с роликовым толкателем. Ролик 2, свободно вращающийся на своей оси, вносит лишнюю степень свободы:
W = 3k – 2p5 – 1p4.
Считая, что ролик жестко связан с толкателем, определяем подвижность по формуле (1.4)
W = 3k – 2р5 – 1р4 = 3×2 – 2×2 – 1 = 1.
Предлагаются задачи, которые следует решить для закрепления материала.
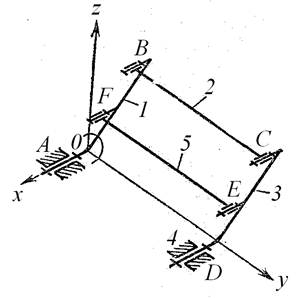
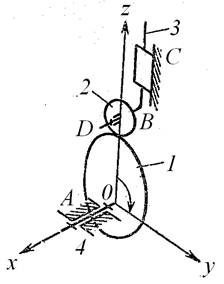
Рис. 1.5. Плоский Рис. 1.6. Плоский кулачковый
шарнирный параллелограмм механизм
ЗАДАЧИ 21 – 29
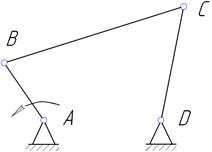
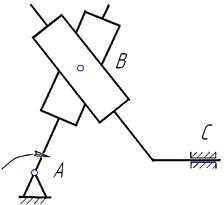
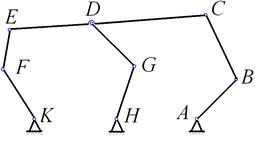
Определить степень подвижности механизмов, изображенных на чертежах.
 К задаче 21 К задаче 21 | 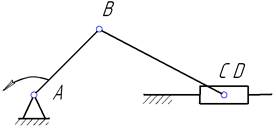 К задаче 22 К задаче 22 | |
 К задаче 23 К задаче 23 | 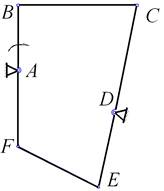 К задаче 24 К задаче 24 | |
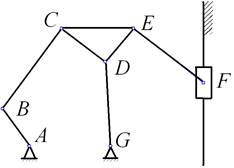 К задаче 25 К задаче 25 | 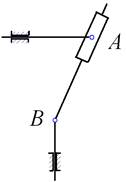 К задаче 26 К задаче 26 | |
 К задаче 27 К задаче 27 | 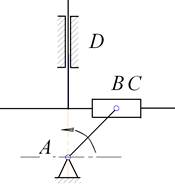 К задаче 28 К задаче 28 |  К задаче 29 К задаче 29 |








