 2015-05-13
2015-05-13 4084
4084Станок-качалка применяется в умеренном и холодном макроклиматических районах. Основные узлы станка-качалки - рама, стойка в виде усеченной четырехгранной пирамиды, балансир с поворотной головкой, траверса с шатунами, шарнирно подвешенные к балансиру, редуктор с кривошипами и противовесами - комплектуется набором сменных шкивов для изменения числа качаний. Для быстрой смены и натяжения ремней электродвигатель устанавливается на поворотной салазке.,
Станки-качалки выполняются в двух исполнениях:
СК, выпускаемые семи и СКД, выпускаемые шести типоразмеров.
 Отличительные особенности станков-качалок типа СКД следующие: кинематическая схема преобразующего механизма несимметричная (дезаксиальная-Д) с углом дезаксиала 9° и повышенным кинематическим отношением 0,6; меньшие габариты и масса; редуктор установлен непосредственно на раме станка-качалки.
Отличительные особенности станков-качалок типа СКД следующие: кинематическая схема преобразующего механизма несимметричная (дезаксиальная-Д) с углом дезаксиала 9° и повышенным кинематическим отношением 0,6; меньшие габариты и масса; редуктор установлен непосредственно на раме станка-качалки.
Принятое условное обозначение станка-качалки характеризует:
СК - станок-качалка;
первая цифра - наибольшая допускаемая нагрузка на устьевой шток, х 10 кН;
|
|
|
вторая цифра - длина хода точки подвеса штанг, м;
третья цифра -наибольший допускаемый крутящий момент на ведомом валу редуктора, х 10-2 кНм.
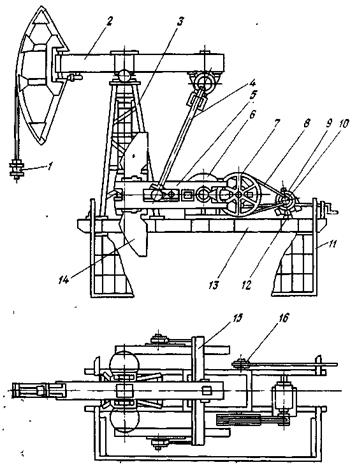
Станок-качалка типа СКД:
1 — подвеска устьевого штока; 2 — балансир с опорой; 3 — стойка; 4 — шатун; 5 — кривошип; 6 — редуктор; 7 — ведомый шкив; 8 — ремень; 9 — электродвигатель; 10 — ведущий шкив; 11 — ограждение; 12 — поворотная плита; 13 - рама; 14 — противовес; 15 — траверса; 16 — тормоз.
 Кинематика точки подвеса штанг
Кинематика точки подвеса штанг
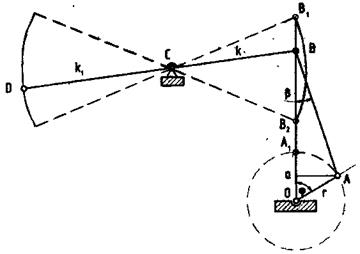
Обозначим: кривошип отрезком ОА длиной r, шатун отрезком АВ длиной l, заднее ВС и переднее СД плечи балансира с длинами соответственно к и к1, база – расстояние между точками О и С длиной р.
Рисунок – Кинематическая схема преобразующего механизма
Элементарная теория основана на следующих допущениях: преобразующий механизм станка-качалки рассматривается как обычный кривошипно-шатунный (т.е. r/l=0; r/k=0).
Приближенная методика (теория) основывается на допущении, что r/k=0, траектория движения точки В – прямая, т.е. по существу также является теорией кривошипно-шатунного механизма, в котором учитываются конечные величины соотношения r/l.
Точная методика (теория) не содержит допущений, принятых в рассмотренных ранее теориях, кроме одного, принятого ранее и специально не оговоренного: мгновенная угловая скорость вращения кривошипа постоянна и неизменна в течение всего двойного хода точки подвеса штанг.








