2020-01-14
2020-01-14 413
413Выбор кинематической схемы
Механизм передвижения тележки предполагается выполнить по кинематической схеме, показанной на рисунке.
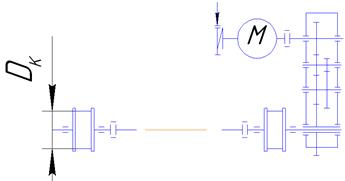
Рис. 2.1. – Кинематическая схема передвижения тележки
Для передачи крутящего момента от двигателя к приводным колесам использован вертикальный редуктор типа ВКН. Вал двигателя соединен с быстроходным валом редуктора втулочно-пальцевой муфтой, на одной половине которой установлен колодочный тормоз с электрогидротолкателем.
Расчет сопротивления передвижению тележки
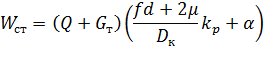
Сопротивление передвижению тележки с номинальным грузом при установившемся режиме роботы определяют по формуле

где  - номинальный вес поднимаемого груза;
- номинальный вес поднимаемого груза;
 - собственный вес крановой тележки; из графиков построенных по характеристикам выпускаемых кранов, принимаем
- собственный вес крановой тележки; из графиков построенных по характеристикам выпускаемых кранов, принимаем 
 - диаметр ходового колеса тележки. Для данной грузоподъемности предварительно можно выбрать диаметр колеса, используясь рекомендациями [2, табл. 25] Принимаем двухребордные колеса с цилиндрическим профилем обода, диаметром
- диаметр ходового колеса тележки. Для данной грузоподъемности предварительно можно выбрать диаметр колеса, используясь рекомендациями [2, табл. 25] Принимаем двухребордные колеса с цилиндрическим профилем обода, диаметром  [2, табл. прил. LIX, LVI ], шириной рабочей дорожки 60 мм (ГОСТ 3569- 74).
[2, табл. прил. LIX, LVI ], шириной рабочей дорожки 60 мм (ГОСТ 3569- 74).
 – диаметр цапфы,
– диаметр цапфы,  принимаем
принимаем 
f =0,015 – коэффициент трения в подшипниках колес; подшипники выбираем сферические двухрядные [2, табл. 26];
μ=0,03 см – коэффициент трения качения колеса по плоскому рельсу. изготовляем колеса из стали 65Г (1050-64), твердость поверхности катания НВ 320…350;
 – коэффициент, учитывающий сопротивление от трения реборд колес о рельсы и от трения токосъемников о троллеи [2, табл. 28];
– коэффициент, учитывающий сопротивление от трения реборд колес о рельсы и от трения токосъемников о троллеи [2, табл. 28];
 - сопротивление придвижению от уклона пути,
- сопротивление придвижению от уклона пути,
 расчетный уклон подкранового пути:
расчетный уклон подкранового пути:
 - для подтележечных путей мостового крана. Уклон незагруженной главной балки принимаем равным нулю;
- для подтележечных путей мостового крана. Уклон незагруженной главной балки принимаем равным нулю;
 – сопротивление передвижению от действия ветровой нагрузки. При расчете мостовых кранов, работающих в закрытых помещениях, принимаем
– сопротивление передвижению от действия ветровой нагрузки. При расчете мостовых кранов, работающих в закрытых помещениях, принимаем  . Наибольшее сопротивление передвижению тележки с номинальным грузом при установившемся режиме
. Наибольшее сопротивление передвижению тележки с номинальным грузом при установившемся режиме