 2020-01-14
2020-01-14 231
231Выбор кинематической схемы
Механизм передвижения крана выбираем с раздельными приводами, кинематическая схема которого представлена на рис. 3.1.
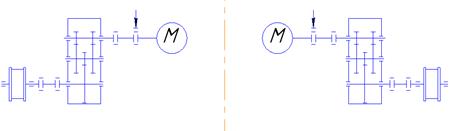
Рис. 3.1. – Кинематическая схема передвижения крана
Электродвигатель, соединенный муфтой с редуктором, передает движения на ведущие колеса. Вал приводного колеса соединен с тихоходным валом редуктора промежуточным валом и зубчатыми муфтами. На полумуфте быстроходного вала редуктора установлен тормоз.
Расчет сопротивления передвижению крана
Сопротивление передвижению крана с номинальным грузом:

где  - номинальный вес поднимаемого груза;
- номинальный вес поднимаемого груза;
 - собственный вес крановой тележки; из графиков построенных по характеристикам выпускаемых кранов, принимаем
- собственный вес крановой тележки; из графиков построенных по характеристикам выпускаемых кранов, принимаем 
 - диаметр ходовых колес. Предварительно принимаем двухребордные колеса с цилиндрическим профилем обода, диаметром
- диаметр ходовых колес. Предварительно принимаем двухребордные колеса с цилиндрическим профилем обода, диаметром  [2, прил. LIX, LVI ], шириной рабочей дорожки 100 мм (ГОСТ 3569- 74).
[2, прил. LIX, LVI ], шириной рабочей дорожки 100 мм (ГОСТ 3569- 74).
 – диаметр цапфы,
– диаметр цапфы,  принимаем
принимаем  [2, табл. 25 ]
[2, табл. 25 ]
f =0,015 – коэффициент трения в подшипниках колес; подшипники выбираем роликовые [2, табл. 26];
μ=0,06 см – коэффициент трения качения колеса по плоскому рельсу. изготовляем колеса из стали 65Г (1050-64), твердость поверхности катания НВ 320…350;
 – коэффициент, учитывающий сопротивление от трения реборд колес о рельсы и от трения токосъемников о троллеи [2, табл. 28];
– коэффициент, учитывающий сопротивление от трения реборд колес о рельсы и от трения токосъемников о троллеи [2, табл. 28];
 - расчетный уклон подкранового пути, укладываемого на металлических балках с железобетонным фундаментом;
- расчетный уклон подкранового пути, укладываемого на металлических балках с железобетонным фундаментом;









