 2018-01-21
2018-01-21 602
602
PID – контроллеры, используемые для астатической стабилизации траекторного движения.
Статические системы обладают ошибкой  ,которая зависит от коэффициентов усиления К системы управления.
,которая зависит от коэффициентов усиления К системы управления.
Астатические системы содержат интегрирующие звенья в передаточной функции W или в передаточной функции цепиобратной связи(ОС).
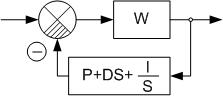
Рис. Схема системы с позиционно-интегральной дифференцирующей обратной связью(РID- контроллер)
Используется закон управления:
Статическая ошибка системы равна 0
PID- контроллер используется для стабилизации высоты полета лайнера и в системах наведения перехватчиков и управляемых ракет.
Для реализации PID- контроллера требуется измерять координаты на выходе.
На вход системы управления следует подавать разность между значением текущей координаты и ее заданным значением для стабилизации с нулевой ошибкой.
Особенности интеграторов состоят в наличии ошибок выставки и скорости ухода интегратора(накопление ошибки по времени).
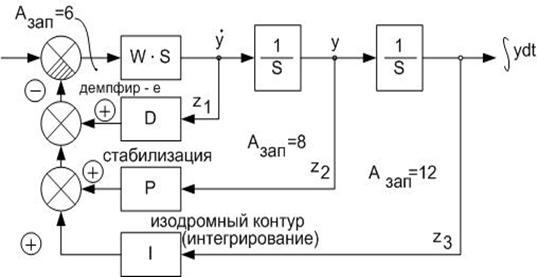
Рис. Схема системы управления с тремя вложенными контурами
Решение задачи с использованием системы MATLABс учетом контура интегрирования координаты по отклонению:
MATLAB: 
Margin(r3)→A3



Ltiview
stepz2,z3
После выбора коэффициентов усиления для замкнутой системы, с помощью программы dampопределяются частоты и коэффициенты демпфирования по формам движения и характеристики переходных процессов для контуров демпфирования, стабилизации и изодромного контура.








