 2015-03-22
2015-03-22 760
760Расчет механических характеристик при пуске асинхронных электродвигателей производится на основе Г-образной схемы замещения (рис.6.2). Здесь  − ток статора;
− ток статора;  − ток ротора, приведенный к статору;
− ток ротора, приведенный к статору;  − ток ветви намагничивания;
− ток ветви намагничивания;  − индуктивное сопротивление статора;
− индуктивное сопротивление статора;  − активное сопротивление статора;
− активное сопротивление статора;  − индуктивное сопротивление ротора, приведенное к статору;
− индуктивное сопротивление ротора, приведенное к статору;  − активное сопротивление ротора, приведенное к статору; s − скольжение;
− активное сопротивление ротора, приведенное к статору; s − скольжение;  − индуктивное сопротивление контура намагничивания.
− индуктивное сопротивление контура намагничивания.
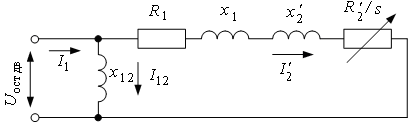
Рис. 21. Г-образная схема замещения асинхронного двигателя
По схеме замещения ток ротора асинхронного двигателя определяется так:
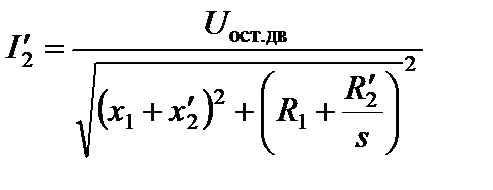 . (6.16)
. (6.16)
где  – фазное напряжение, подводимое к статору.
– фазное напряжение, подводимое к статору.
В соответствии с энергетическим балансом асинхронных двигателей потери мощности в роторной цепи представляются выражением,
 , (6.17)
, (6.17)
где  − синхронная скорость.
− синхронная скорость.
Скольжение рассчитывается по формуле
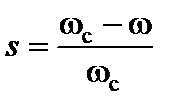 . (6.18)
. (6.18)
Совместное решение (6.16) и (6.17) позволяет получить уравнение механической характеристики асинхронного двигателя в виде:
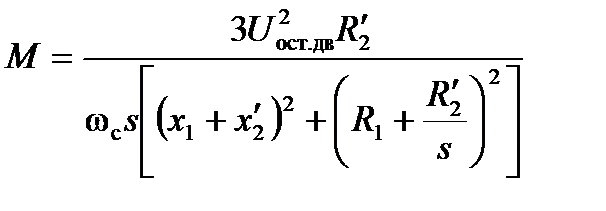 . (6.19)
. (6.19)
Продифференцировав (6.19) относительно скольжения и исследовав функцию на экстремум, получим максимальный (критический) момент асинхронного двигателя.
 . (6.20)
. (6.20)
Критический момент получен при критическом значении скольжения, которое рассчитывается по формуле:
 . (6.21)
. (6.21)
Пусковой ток ротора асинхронного двигателя из (6.16) для  будет:
будет:
 . (6.22)
. (6.22)
Пусковой ток статора:
 . (6.23)
. (6.23)
Пусковой момент двигателя из (6.19) для представляется выражением
 . (6.24)
. (6.24)
Формулы (6.21)-(6.24)позволяют построить механические и электромеханические характеристики асинхронного электродвигателя, которые могут быть использованы для предварительной оценки пусковых режимов асинхронных электродвигателей.
Механические характеристики асинхронного двигателя представлены на рис. 6.3
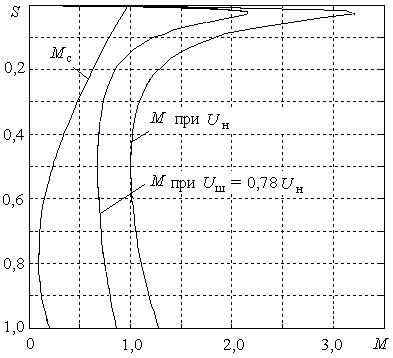
Рис. 22. Механические характеристики асинхронного двигателя
Представленные на рис.22 характеристики позволяют предварительно оценить возможность запуска асинхронного двигателя с учетом провала напряжения, обусловленного всей цепочкой элементов составляющих систему электроснабжения технологического объекта.
Более точную оценку возможностей электропривода при пуске с учетом влияния дополнительных факторов, рассмотренных выше, позволит динамическая модель системы.








