 2015-03-22
2015-03-22 803
803Более эффективным способом формирования пусковых режимов необходимого качества является схема с регулятором напряжения фазового типа.
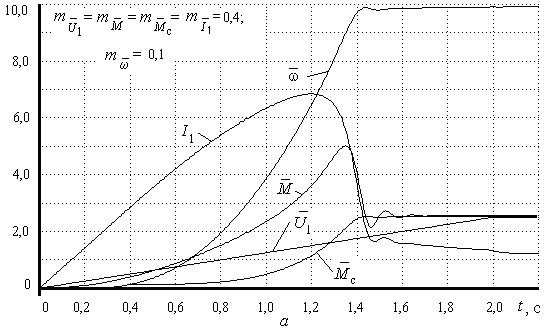
Задача регулятора напряжения при пуске асинхронного двигателя состоит в формировании закона изменения подводимого к статору напряжения нужной формы. Пуск асинхронного двигателя осуществляется при линейном подъеме напряжения статора от нуля до номинального значения в течение заданного времени (рис.7.8).
Варианты схем и свойства электроприводов такого типа в установившихся режимах рассмотрены в подразд. 4.4.
|
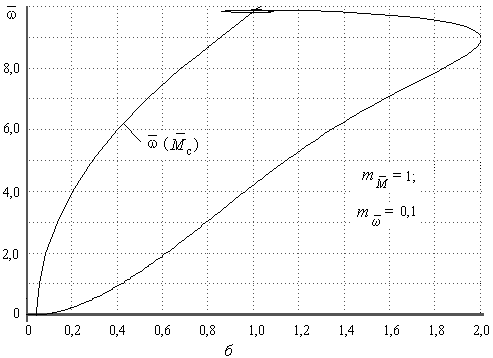
Рис.24. Временные зависимости (а) и механические
характеристики (б) при пуске привода линейным подъемом
за 2 секунды статорного напряжения
Анализ переходных процессов показывает, что полностью устраняются колебания электромагнитного момента, вызванные свободными составляющими пускового тока.
Максимальные значения пусковых токов зависят от времени подъема напряжения и могут колебаться в пределах I max ≈3,0 I ном
|
|
|
при времени пуска t п = 1 с, до I max ≈ 2,0 I ном при t п = 10 с.
Заслуживает внимания структура устройства плавного пуска (УПП), сформированная по принципу поддержания постоянства пускового тока. Значение пускового тока рассчитывается по условию поддержания заданного провала напряжения. Разгон двигателя плавным нарастанием напряжения устраняется негативное влияние свободных составляющих пусковых токов, однако решить однозначно проблему ограничения провалов напряжения невозможно.
Значение пускового тока за время переходного процесса меняется. На значение тока влияет целый ряд факторов, зависящих от характера технологического процесса: значения статического момента, приведенного момента инерции, времени нарастания напряжения на зажимах двигателя и т.д. Поэтому целесообразно рассмотреть структуру электропривода с УПП, позволяющую поддерживать постоянство тока в течение всего переходного процесса на уровне значений, обеспечивающих заданный техническими условиями минимум провала напряжения.
Задача определения минимально допустимого ограничения тока решается по электромеханическим и механическим характеристикам двигателя, которые рассчитываются как электромеханическая характеристика:
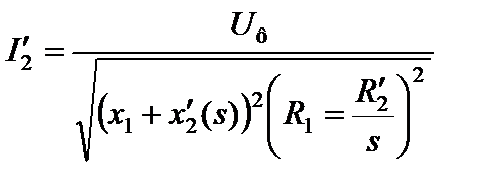 ; (6.34)
; (6.34)
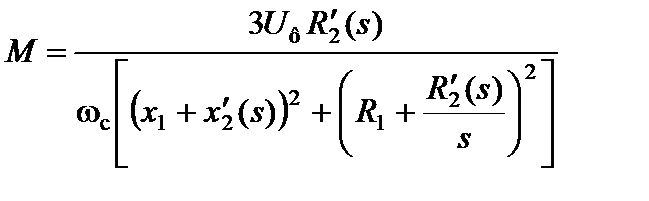 (6.35)
(6.35)
Характеристики могут быть уточнены с учетом эффекта вытеснения тока в роторе
 ;
;
 .
.
Учитывая, что при пуске напряжение, подводимое к статору, не превышает номинальное значение, пусковые режимы лежат в пределах зоны, ограниченной естественной характеристикой (рис.6.45).
| Рис.25. Семейство характеристик при различных токоограничениях пускового устройства |
|
|
|
В расчетах за независимый параметр принимается заданное значение пускового тока  (k – кратность пускового тока). Задаваясь рядом значений скольжения s по (6.34
(k – кратность пускового тока). Задаваясь рядом значений скольжения s по (6.34  ), рассчитывается фазное напряжение U ф i и по (6.35) соответствующий момент Mi.
), рассчитывается фазное напряжение U ф i и по (6.35) соответствующий момент Mi.
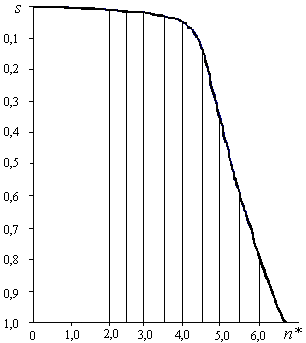
Анализ кривых, полученных при различных кратностях пускового тока и характеристик статической нагрузки (рис.7.10) показывает, что существуют минимальные кратности пускового тока, при которых двигатель выйдет на номинальную частоту вращения. В данном случае  .
.

Рис.26. Семейство характеристик  для различных значений ограничения
для различных значений ограничения
тока пускового устройства
При уставке тока  , пуск двигателя заканчивается при скольжении s= 0,4.
, пуск двигателя заканчивается при скольжении s= 0,4.
В этом случае следует реализовать ступенчатый временной принцип уравнения пуском:
на первой ступени пуск с ограничением тока, на второй – с плавным увеличением напряжения до номинального значения.








