 2015-02-27
2015-02-27 307
307В системах управления отдельные звенья могут соединяться между собой. Существует три вида соединения звеньев: последовательное, параллельное и встречно-параллельное.
При последовательном соединении выход первого звена является одновременно входом второго, выход второго – входом третьего и т.д. Определим передаточную функцию такого соединения: H(S)=Y(S)
X(S).

Рисунок 2.13 – Последовательное соединение звеньев
Из рис. 2.13 видно, что вход первого звена X1 одновременно является входом всей системы X, выход первого звена Y1 – входом второго X2, выход второго звена Y2 – входом третьего X3, а выход третьего звена Y3 – выходом всей системы Y. Поэтому передаточная функция всей системы равна:
| (2.59) |
Иными словами, передаточная функция последовательного соединения звеньев равна произведению передаточных функций этих звеньев.
При параллельном соединении звеньев (см. рис. 2.14) один и тот же входной сигнал X подается на входы всех звеньев, а выходы всех звеньев суммируются. Поэтому передаточная функция системы:
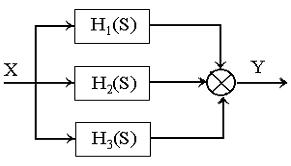
Рисунок 2.14 – Параллельное соединение звеньев
| (2.60) |
то есть передаточная функция параллельного соединения звеньев равна сумме передаточных функций этих звеньев.
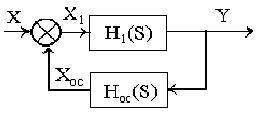
Рисунок 2.15 – Встречно-параллельное соединение звеньев
Если выход звена с передаточной функцией H1(S) подается через звено с передаточной функцией Hос(S) на его вход, то такое соединение звеньев называется встречно-параллельным. Из рис. 2.15 видно, что сигнал, подаваемый на вход звена с передаточной функцией H1(S)
  , ,
| (2.61) |
где знак «+» соответствует положительной обратной связи, а знак «–» отрицательной обратной связи. Отсюда следует, что
 . .
| (2.62) |
Тогда передаточная функция встречно-параллельного соединения
 . .
| (2.63) |
T.к. Y(S) = Y1(S), то
 . .
| (2.64) |
Понятно, что знак «–» в выражении (2.64) относится к положительной обратной связи, а знак «+» к отрицательной.








